
Por: Capitán de Navío José Rojas Medina (ARBV)
Existen diversos medios para enfrentar los submarinos diesel, tales como: Medios aéreos, Buques de Superficie (con apoyo de helicópteros AS) y Submarinos. Realmente, desplegar medios aéreos para efectuar una búsqueda y lograr mantener un contacto submarino a través del uso de MM), sonó boyas pasivas y activas corresponde a Armadas altamente desarrolladas con un abultado presupuesto. A pesar de los avances tecnológicos en lo relativo a Sonar, las unidades de superficie siguen siendo vulnerables y tienen poca posibilidad de detección ante el submarino; los arreglos remolcados (towed array) solo han servido para limitar en maniobra a las unidades de superficie; los nuevos sonares (Arreglo vertical) diseñados para los helicópteros ofrecen una alta probabilidad de detección, pero este medio además de costoso requiere de un adiestrado e integrado equipo buque-helicóptero. Aunque muchos teóricos afirmen que es poco probable la guerra Submarino Vs. Submarino, el medio submarino propio es la opción menos vulnerable, más eficiente y económica para la búsqueda, detección y destrucción de la fuerza submarina ENEMIGA.
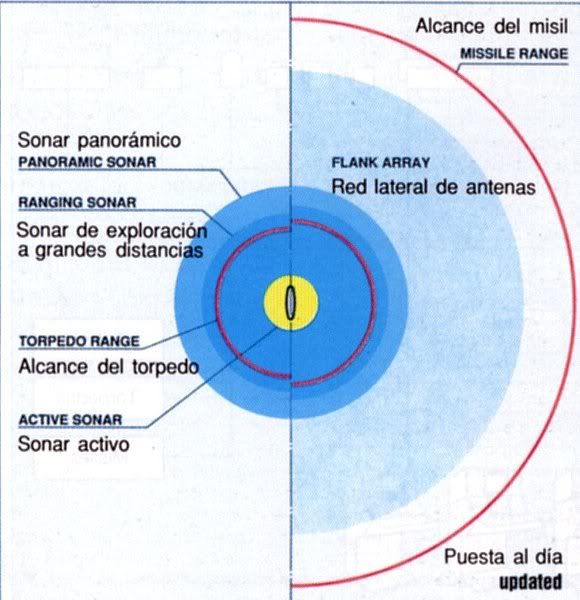
En la actualidad los submarinos a Diesel están siendo diseñados con un bajísimo nivel de ruido, para navegar en cualquier tipo de agua, sin dependencia en baterías para mantenerse por largo tiempo en inmersión, equipados con precisos sistemas de detección y "letales" sistemas de armas. Una Armada de modestos recursos debe de mantener a toda costa su flota submarina con un aceptable nivel de ruido y equipar esas unidades con eficientes sistemas de detección a baja frecuencia (0-1000Hz.). Los usuales sistemas de detección de los submarinos son los siguientes: Un arreglo circular de hidrófono (CHA) para la detección pasiva (50Hz-12.5KHz.), este sistema promete un alcance aproximado de unas 8 millas para la detección de superficie y una detección máxima de 1000 yardas para submarinos a diesel debido al diámetro de la antena. Un arreglo circular de hidrófonos (CIA) para interceptar y analizar señales activas de otras fuentes. Un arreglo plano de hidrófonos (PRS) para la detección pasiva de superficie(2-8KHz.). Un arreglo circular de transducer (CTA) para la determinación de distancia submarina y de superficie en forma activa. Un Flank Array para la detección submarina en forma pasiva (0-1000Hz.). En el presente articulo pretendo argumentar las ventajas que puede ofrecer un arreglo paralelo (Flank Array).
¿Por qué un flank array?
Se puede asegurar, salvo algunas excepciones que los significantes Source levels (SL) provenientes de los blancos submarinos ocurren a baja frecuencia. También, las discretas líneas de las firmas acústicas a estas bajas frecuencias, pueden ser usadas para mejorar el proceso de identificación. El objetivo de un Flank Array integrado es mejorar la prestaciones operativas de un moderno sistema de comando y control como el ISUS en las siguientes áreas:
- Detección de blancos con bajo nivel de ruido a largas distancias.
- Clasificación de blancos usando la información del LOFAR (low frequency analysis and recording)
- Las más importantes funciones de un Flank Arrray son las siguientes:
- Detección de energía en banda ancha
- Detección de la línea en banda estrecha
- Análisis LOFAR/DEMON para la clasificación.
Importancia del LOFAR
El LOFAR es usado para detectar y clasificar ruidos en el mar, especialmente aquellos producidos por buques de superficie y submarinos. La técnica, permite mediante el análisis de la firma acústica identificar la clase de unidad, bajo determinadas condiciones. Las unidades de superficie y submarinas generan ruidos en banda ancha y singulares líneas en bandas de frecuencias que van desde unos pocos hertz en adelante; esto se denomina "componente discreto" y es de principal interés en la banda del LOFAR. Estos discretos componentes son causados principalmente por sistemas de propulsión como turbinas, diesel, propelas y maquinaria auxiliar, tales como: bombas, generadores, engranajes> etc. Todas estas maquinarias producen oscilaciones las cuales originan vibraciones en la estructura del casco de la unidad.
El casco externo actúa como una corneta, que transmite ondas de presión al externo. La frecuencia a la cual estas ondas de presión son radiadas es igual a las frecuencias en la cual las oscilaciones son generadas por las maquinas. Estas ondas de presión propagadas en el agua pueden ser detectadas y convertidas a energía eléctrica por un determinado receptor. Estas señales son las que alimentan un sistema LOFAR.
Sonido de la fuente Frecuencia fundamental y Armónicas
El sonido radiado por una fuente es recibido por el receptor como una señal a una frecuencia particular con oscilaciones múltiples de esta frecuencia. La frecuencia particular es llamada "frecuencia fundamental" y las múltiples de esta frecuencia son llamadas "armónicas".
Teoría para el calculo de frecuencia fundamental de la hélice
Frecuencia fundamental (fl) = Rpm / 6Oseg (para una aspa)
En el caso de 3 nudos y 5 aspas: fl= 30 / 60 x Nº de aspas = 0,5 (5) = 2,5 Hz

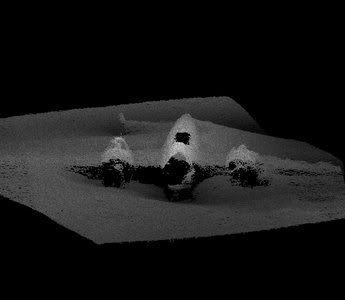
Fig 1. Presentación del LOFAR (LOFARGRAM) de un Do-17 derribado durante la batalla de Inglaterra en el Canal de la Mancha
Finalmente, detectando los tonos provenientes de una unidad de superficie o submarina a baja frecuencia a través de un flank array y analizando el LOFARGRAM ofrecido por un sistema de comando y control como el ISUS, la frecuencia fundamental puede ser determinada con un rastreo de las armónicas o el uso de un divisor de 10 puntas. La identificación se consolida comparando los resultados obtenidos con los tabulados u obtenidos utilizando un calculo teórico.
Link a la nota