
Mostrando entradas con la etiqueta introducción. Mostrar todas las entradas
Mostrando entradas con la etiqueta introducción. Mostrar todas las entradas
jueves, 6 de enero de 2022
martes, 20 de julio de 2021
Cuando surgieron los portaaviones y por qué
Los primeros portaaviones: cómo, dónde y cuándo fue
Revista Militar
Portaaviones ligero japonés "Hosho"
Algunos historiadores se inclinan a considerar la primera experiencia de uso conjunto de embarcaciones aéreas y marítimas llevada a cabo en 1904 al elevar un globo sobre el acorazado ruso Sinop. Antes de eso, los marineros se negaban rotundamente a los objetos voladores en términos de su uso junto con los barcos; al menos pueden confundirse con el equipo.
Sobre los primeros portaaviones: cómo, dónde y cuándo fue.
De hecho, los primeros barcos que transportaban aviones bastante aptos para realizar misiones de combate eran, de hecho, unidades de combate reconvertidas para esta necesidad, que inicialmente tenía un propósito completamente diferente. El francés "Foudre" o el británico "Hermes" fueron construidos y operados primero como base móvil para torpederos, y el segundo como crucero. Y, por cierto, incluso después de "re-perfilar" y una buena cantidad de reequipamiento, no se convirtieron en portaaviones en nuestro sentido habitual. Incluso fueron llamados de otra manera: "aviones".El caso es que estos barcos se usaban como hangares flotantes para hidroaviones, es decir, máquinas que, al tener flotadores en lugar de un tren de aterrizaje, despegaban de la superficie del agua y aterrizaban en ella. Elevados por grúas hasta la cubierta, los hidroaviones simplemente se colocaron en hangares ubicados a bordo del barco y no podrían despegar sin la ayuda de los mismos operadores de grúas. Por regla general, se trataba de torpederos destinados a atacar objetivos navales o aviones de reconocimiento.
En el momento de la colisión de las potencias mundiales en la Primera Guerra Mundial, o en su proceso, tales barcos habían adquirido, casi todos los participantes en el conflicto, vale la pena mencionar los británicos "Engadine" y "Ben-my-Chree" "Ark-Royal", el alemán "Answald" y "Santa Elena ", Así como el barco ruso" Orlitsa ". Los italianos no se "molestaron" con este tema. Sin embargo, todos estos no eran portaaviones en el sentido habitual de la palabra, sino, de hecho, barcos de transporte aéreo.
Al mismo tiempo, se llevó a cabo el primer ataque aéreo contra un objetivo "terrestre" utilizando aviones basados en el mar: siete aviones que despegaron de un barco británico atacaron con éxito una base aérea alemana. Así, se abrió una nueva dirección de acción para los portaaviones.
El uso en combate de hidroaviones en escenarios reales de operaciones militares desde 1914 hasta 1918 demostró de manera muy convincente que los vehículos con chasis de ruedas tienen una enorme ventaja sobre sus homólogos "aves acuáticas". Privados de flotadores voluminosos, eran más maniobrables y rápidos. Al final, fueron adecuados para realizar misiones de combate no solo en el mar, sino también en tierra. Todo se debía a que la máquina alada tenía que "aprender" a aterrizar en la cubierta del barco y despegar de ella.
Es revelador que en ese momento se llevaran a cabo experimentos de este tipo durante mucho tiempo, principalmente en Estados Unidos y Gran Bretaña. Debo decir que pasaron con diferente éxito: un fuerte cabeceo fue suficiente y el vuelo, o más bien un intento de completarlo a bordo del barco, terminó en tragedia. Sin embargo, los pilotos obstinados y entusiastas no se rindieron, y el mundo vio el primer portaaviones "clásico": el británico "Argus" (HMS Argus). Era un barco que no tenía superestructuras y su única cubierta era, de hecho, una pista de aterrizaje para dos docenas de aviones.
Después de la primera guerra mundial
En 1920, los portaaviones toman su apariencia "clásica" final - aparece una superestructura tipo "isla" en el lado de estribor. Esta disposición se debe al hecho de que, según las observaciones, el piloto que no consiguió aterrizar el avión en cubierta en 9 casos de 10 lo gira ciertamente hacia la izquierda. Pero había barcos que transportaban aviones con una superestructura en el otro lado.Aproximadamente desde el mismo tiempo - finales de los años 20 - principios de los 30 del siglo XX - los portaaviones finalmente se destacan como una clase independiente de buques de guerra. Los primeros barcos diseñados específicamente como portaaviones fueron el británico Hermes y el japonés Hosho (Hosho). No importa cuántos "aeródromos flotantes" hayan surcado el mar antes, todos fueron convertidos para nuevas necesidades por buques cisterna, graneleros, cruceros o acorazados. Incluso hubo cruceros en esta "familia".
El Tratado Naval de 1922, firmado por varias potencias en Washington y que limitaba el desplazamiento de los acorazados, pero no decía nada sobre los portaaviones, contribuyó especialmente al "progreso de los portaaviones". Fue él quien empujó al mismo Japón a convertir una serie de acorazados en portaaviones.
Después del final de la Segunda Guerra Mundial, comenzó la era de los portaaviones estadounidenses. Y en 1991, al parecer, llegó el momento de su dominio absoluto indiviso en todas las latitudes. Sin embargo, según muchos expertos militares, ya ha terminado, con la aparición de nuevos medios de destrucción de objetivos marinos.
domingo, 6 de enero de 2019
Buques de guerra: Crucero
Crucero
Wikipedia
Un crucero es un tipo de buque de guerra. El término ha estado en uso durante varios cientos de años, y ha tenido diferentes significados a lo largo de este período. Durante la Era de la vela, el término "crucero" se refería a ciertos tipos de misiones: exploración independiente, protección del comercio o incursiones, realizadas por una fragata o balandra, que eran los buques de guerra de crucero de una flota. Los cruceros modernos son generalmente los barcos más grandes en una flota después de los portaaviones, y generalmente pueden realizar varios roles.
A mediados del siglo XIX, el crucero se convirtió en una clasificación para los barcos destinados a cruzar aguas distantes, ataques al comercio y exploración de la flota de batalla. Los cruceros llegaron en una amplia variedad de tamaños, desde el crucero de tamaño mediano hasta grandes cruceros acorazados que eran casi tan grandes (aunque no tan potentes ni tan bien blindados) como un encorazado pre-acorazado. Con el advenimiento del acorazado dreadnought antes de la Primera Guerra Mundial, el crucero blindado se convirtió en un buque de similar escala conocido como el crucero de batalla. Los cruceros de batalla muy grandes de la época de la Primera Guerra Mundial que sucedieron a los cruceros blindados ahora se clasificaron, junto con acorazados dreadnought, como naves capitales.
A principios del siglo XX, después de la Primera Guerra Mundial, los sucesores directos de los cruceros protegidos podían colocarse en una escala constante de tamaño de buque de guerra, más pequeño que un barco de guerra pero más grande que un destructor. En 1922, el Tratado Naval de Washington impuso un límite formal a estos cruceros, que se definieron como buques de guerra de hasta 10.000 toneladas de desplazamiento con cañones de calibre no superior a 8 pulgadas; los cruceros pesados tenían cañones de 8 pulgadas, mientras que aquellos con cañones de 6,1 pulgadas o menos eran cruceros ligeros, lo que dio forma al diseño del crucero hasta el final de la Segunda Guerra Mundial. Algunas variaciones en el diseño del crucero del Tratado incluyeron los "acorazados de bolsillo" de la clase Deutschland que tenían un armamento más pesado a expensas de la velocidad en comparación con los cruceros pesados estándar, y la clase estadounidense Alaska, que era un diseño de crucero pesado a escala designado como "asesino de cruceros".

USS Port Royal, un crucero de misiles guiados de clase Ticonderoga, lanzado en 1992

Crucero ruso clase Slava Varyag en el Océano Pacífico
A finales del siglo XX, la obsolescencia del acorazado dejó al crucero como el combatiente de superficie más grande y más poderoso después del portaaviones. El papel del crucero variaba según el barco y la marina, a menudo incluyendo la defensa aérea y el bombardeo de tierra. Durante la Guerra Fría, los cruceros de la Armada soviética tenían un armamento antimisiles pesado diseñado para hundir a las fuerzas de tarea de la OTAN a través del ataque de saturación. La Marina de los EE. UU. Construyó cruceros de misiles guiados sobre cascos estilo destructor (algunos denominados "líderes destructores" o "fragatas" antes de la reclasificación de 1975) diseñados principalmente para proporcionar defensa aérea mientras que a menudo añadían capacidades antisubmarinas, eran más grandes y tenían mayor rango de misiles tierra-aire (SAM) que los primeros destructores de misiles dirigidos Charles F. Adams encargados de la función de defensa aérea de corto alcance. Al final de la Guerra Fría, la línea entre cruceros y destructores se había desdibujado, con el crucero clase Ticonderoga usando el casco del destructor clase Spruance pero recibiendo la designación del crucero debido a su misión mejorada y sistemas de combate. De hecho, los destructores más nuevos de la Marina de EE. UU. (Por ejemplo, la clase Arleigh Burke y la clase Zumwalt) están más fuertemente armados que algunos de los cruceros que tuvieron éxito.
Actualmente solo dos naciones operan cruceros: los Estados Unidos y Rusia. (BAP Almirante Grau todavía estaba en servicio con la Marina peruana hasta 2017, y fue el último crucero de armas en servicio en cualquier armada).
miércoles, 6 de junio de 2018
De donde vienen los términos estribor y babor
¿Por qué se llama babor y estribor a los lados del barco?
Muy Interesante
 |
| Las primeras embarcaciones eran guiadas por dos enormes remos colocados uno a cada lado del timón. |
Sin embargo, la gran cantidad de remeros que se precisaba para mover estas naves dejaba muy poco espacio para la carga. Los soberbios barcos vikingos incorporaron después un único remo y, para que el timonel pudiera maniobrar con más facilidad, se fijó a la pértiga un timón horizontal.
Por motivos que todavía se ignoran, este remo se situó al lado derecho del timón, de frente a la proa. En inglés antiguo, a la parte derecha del barco se la denominó steorborde (lado de la dirección). Este término dio lugar al de starboard (estribor). El área izquierda de la nave, por su parte, fue bautizada al principio como laddeborde (lado de carga), para terminar siendo llamada larboard.
La Marina británica resolvió en 1844 prohibir el uso del término larboard y sustituirlo por el de port (babor). Esta nueva denominación fue introducida en EE UU dos años después. La razón fundamental de este cambio se debió a las desastrosas consecuencias que trajo consigo el hecho de que algunas tripulaciones confundían el significado de larboard y starboard. Se especula con que el término Port quizá provenga del original port-side, que hacía referencia al lado por el que se anclaba el barco al muelle.
domingo, 26 de febrero de 2017
Introducción: Crucero acorazado
Crucero acorazado
Wikipedia
El crucero acorazado es un tipo de crucero, un buque de guerra. El crucero acorazado se protegía mediante un cinturón acorazado en adición a las cubiertas también acorazadas y a la protección de los depósitos de carbón que definían a los cruceros protegidos.
Los cruceros acorazados fueron los principales navíos de dos batallas navales; la Batalla de Ulsan de la Guerra Ruso-Japonesa, y la Batalla de Coronel de la Primera Guerra Mundial, y jugaron un importante papel como apoyo en otras batallas del período comprendido entre ambas.
El desarrollo de las granadas explosivas, a mediados del siglo XIX, hizo necesario el uso de una protección en los buques de guerra, aunque fuera a costa de un aumento del peso y del precio. Los cruceros acorazados comenzaron a aparecer en las armadas occidentales en torno a 1873 y continuaron fabricándose hasta 1908, cuando este tipo de buque quedó desfasado ante los buques tipo dreadnought y su concepto 'all big gun' (todos los cañones grandes), especialmente, con los cruceros de batalla, que se consideran sus sucesores y en cuya comparación salían notablemente desfavorecidos.

Crucero acorazado SMS Blücher de la Marina Imperial Alemana (1912)

Esquema de la sección típica de un crucero acorazado con una cubierta superior y media acorazadas, y un cinturón acorazado lateral (rojo), la protección lateral, recaía igualmente en los depósitos de carbón (gris) y con compartimentos interiores estancos. La maquinaria se situaba en la parte interna protegida.
El primer auténtico crucero acorazado fue el buque de la armada francesa Dupuy de Lôme, botado en 1887.1 El mismo año, el buque ruso Ryurik entró en servicio.
El primer buque que la mayoría de las fuentes acepta como perteneciente a este tipo fue el crucero acorazado de la Armada Imperial Japonesa construido en los astilleros de River Clyde Chiyoda.2 Los avances del Chiyoda se centraron en la adopción de una maquinaria de vapor vertical de triple expansión.2 A diferencia de las horizontales, que ocupaban todo el ancho del buque, la máquina vertical se podía situar en la zona de la línea de crujía y rodearla con los depósitos de carbón, cinturón blindado y cubiertas blindadas, lo que creaban un área protegida que la mantenía a salvo.2 Aunque el Chiyoda era demasiado pequeño para ser considerado un auténtico crucero acorazado, sentó las bases de lo que sería este tipo de buques.
El último crucero acorazado fue construido en torno a 1910. En esa época estaban cayendo rápidamente en la obsolescencia debido al desarrollo de nuevas tecnologías que permitieron crear los buques de tipo dreadnought, motorizados con turbinas de vapor, y la adopción del fuel oil como combustible, que hicieron que no fueran necesarios los depósitos de carbón, por lo que necesitaban otro tipo de protección. Los cruceros acorazados fueron sustituidos en las flotas por los mayores, más rápidos y mejor armados cruceros de batalla. Los grandes cruceros acorazados quedaron obsoletos y, desde ese momento, solo se construyeron cruceros ligeros y posteriormente cruceros pesados. Los cruceros acorazados existentes se utilizaron desde entonces en tareas de patrulla y tareas secundarias, hasta el final de la Segunda Guerra Mundial.

Crucero acorazado ruso General Admiral de 1873.

Crucero acorazado Chiyoda de 1890)

Crucero alemán Blücher de 1908.
Por ejemplo el Rurik de la Armada Imperial Rusa de 1892, portaba cuatro piezas de 203 mm (8 pulgadas), 16 de 151 mm (6 pulgadas) y 6 piezas de 120 mm (4,7 pulgadas); el francés Victor Hugo, portaba cuatro piezas de 240 mm (9.4 pulgadas) y 16 de 194 mm (7,5 pulgadas). Los numerosos buques de la clase británica Monmouth de 1901 eran la excepción. El diseño hizo un especial énfasis en la protección por sobre otros aspectos; contaba con un armamento uniforme compuesto por catorce piezas de 151 mm (6 pulgadas). Posteriormente, los cruceros acorazados fueron incrementando su armamento; por ejemplo, el británico HMS Warrior de 1905, portaba seis piezas de 234 mm (9,2 pulgadas) y cuatro piezas de 190 mm (7,5 pulgadas; El alemán SMS Blücher de 1909, portaba doce piezas de 210-mm (8.2 pulgadas) y ocho de 150-mm (5.9 pulgadas); y el segundo Rurik construido en 1906 por Vickers) portaba cuatro piezas de 254 mm (10 pulgadas), 8 de 203 mm (8 pulgadas) y 20 piezas de 120 mm (4,7 pulgadas). El buque griego Georgios Averof, de la clase Pisa, construido en Livorno, Italia, contaba con 4 piezas de 234 mm (9,2 pulgadas), 8 de 190 mm (7,5 pulgadas) y 16 de 75 mm (3 pulgadas), y demostró sus cualidades contra la flota otomana en las batallas de Elli y Lemnos.

Brooklyn (1898).
El primer crucero acorazado de la Armada de los Estados Unidos fue el USS Maine, cuya explosión en 1898 provocó el inicio de la Guerra Hispano-Estadounidense. Fue botado en 1889, tenía un blindaje de entre 178 y 305 mm (entre 7 y 12 pulgadas) en su cinturón blindado y de 25 a 101 mm (entre 1 y 4 pulgadas) en su cubierta. Fue rediseñado como acorazado de segunda clase en 1894, en una solución de compromiso, ya que resultaba lento comparado con otros cruceros y débil comparado con los acorazados de primera línea.
El New York, botado en 1895, estaba peor protegido que el Maine, con 76 mm (3 pulgadas) en su cinturón blindado, y entre 76 y 152 mm (entre 3 y 6 pulgadas) en su cubierta blindada. El Brooklyn fue una versión mejorada de los diseños del New York y del Olympia.
Poco después de la guerra Hispano-Estadounidense, la armada de los Estados Unidos construyó seis cruceros acorazados de la clase Pennsylvania, inmediatamente seguidos de los cuatro de la Tennessee. Colectivamente suelen nombrarse estos diez buques como los 'diez grandes'.
La batalla de Tsushima[editar]
Los cruceros acorazados fueron utilizados con éxito en la línea de batalla de la armada imperial japonesa en la Batalla de Tsushima de 1905. De los daños recibidos por los japoneses, el crucero acorazado Nisshin fue el segundo que más impactos recibió tras el acorazado japonés Mikasa. El Nisshin fue impactado en 13 ocasiones, incluyendo un impacto de 228 mm (9 pulgadas) y seis de 305 mm (12 pulgadas). El Nisshin consiguió mantenerse en la línea durante todo el combate, validando de esta manera las esperanzas de sus diseñadores: un crucero capaz de mantenerse en la línea de combate. El rendimiento de los cruceros acorazados japoneses durante la batalla de Tsushima, y especialmente el del Nisshin, crearon un boom en la construcción de cruceros acorazados en las armadas de todo el mundo.

El crucero acorazado chileno O'Higgins de 1898 fue el buque insignia de Chile hasta 1931.
Los cruceros acorazados comenzaron a considerarse obsoletos a partir 1907, cuando la Royal Navy introdujo la clase Invincible de cruceros de batalla. El año anterior los británicos habían botado el revolucionario HMS Dreadnought. Los clase Invincible además de la batería de armas de grueso calibre uniforme, poseía una alta velocidad al coste de reducir el blindaje; no obstante, en una comparación con los cruceros acorazados eran más rápidos, estaban mejor blindados y poseían una mayor potencia de fuego.
El último crucero acorazado construido fue el SMS Blücher. Aunque quizás fue el mejor de este tipo de buques se consideró un fracaso, puesto que se construía como respuesta a los clase Invencible y los británicos consiguieron engañar al espionaje alemán en las especificaciones de estos.
La Batalla de Coronel, que tuvo lugar poco antes de la batalla de las Malvinas, fue una de las últimas batallas en la que las principales unidades involucradas en ambos bandos fueron cruceros acorazados. Todos los enfrentamientos siguientes estuvieron dominados por buques tipo dreadnought, acorazados y cruceros de batalla.
Durante la Batalla del Banco Dogger, el SMS Blücher mostró su lentitud al almirante Hipper con respecto al resto de su escuadra, compuesta por cruceros de batalla; Hipper tomó la decisión de sacrificar el crucero acorazado con gran pérdida de vidas para permitir que se salvasen sus unidades más modernas y valiosas.
Los HMS Warrior, Defence y Black Prince fueron hundidos en la Batalla de Jutlandia cuando se enfrentaron a la línea de batalla de la Armada alemana, la cual incluía cruceros de batalla y acorazados tipo dreadnought.

El Georgios Averof (Clase Pisa) hoy convertido en museo.
El 17 de julio de 1920, cuando la armada de los Estados Unidos adoptó su actual sistema de nomenclatura de unidades navales, todos los cruceros acorazados de los Estados Unidos fueron fusionados con los cruceros protegidos en la clasificación 'CA', eliminándose el término crucero acorazado para referirse a ellos en la US Navy. El Tratado naval de Londres de 1930 entre otras cuestiones abolió el término 'crucero acorazado' y adoptó los términos crucero pesado y crucero ligero, tras lo cual el símbolo 'CA' fue usado para designar a los 'cruceros pesados'.
Uno de los últimos diseños de crucero acorazado ha llegado hasta nuestros días, el Georgios Averof, construido entre 1909 y 1911 que se conserva como buque museo en Grecia.
Wikipedia
El crucero acorazado es un tipo de crucero, un buque de guerra. El crucero acorazado se protegía mediante un cinturón acorazado en adición a las cubiertas también acorazadas y a la protección de los depósitos de carbón que definían a los cruceros protegidos.
Los cruceros acorazados fueron los principales navíos de dos batallas navales; la Batalla de Ulsan de la Guerra Ruso-Japonesa, y la Batalla de Coronel de la Primera Guerra Mundial, y jugaron un importante papel como apoyo en otras batallas del período comprendido entre ambas.
El desarrollo de las granadas explosivas, a mediados del siglo XIX, hizo necesario el uso de una protección en los buques de guerra, aunque fuera a costa de un aumento del peso y del precio. Los cruceros acorazados comenzaron a aparecer en las armadas occidentales en torno a 1873 y continuaron fabricándose hasta 1908, cuando este tipo de buque quedó desfasado ante los buques tipo dreadnought y su concepto 'all big gun' (todos los cañones grandes), especialmente, con los cruceros de batalla, que se consideran sus sucesores y en cuya comparación salían notablemente desfavorecidos.
Evolución y diseño
Primeros diseños
Los primeros grandes cruceros acorazados, fueron el buque ruso General Admiral (1873) y el británico Shannon (1875), aunque al primero se lo designaba inicialmente como fragata blindada o ironclad.Crucero acorazado SMS Blücher de la Marina Imperial Alemana (1912)
Esquema de la sección típica de un crucero acorazado con una cubierta superior y media acorazadas, y un cinturón acorazado lateral (rojo), la protección lateral, recaía igualmente en los depósitos de carbón (gris) y con compartimentos interiores estancos. La maquinaria se situaba en la parte interna protegida.
Cruceros acorazados modernos
El primer auténtico crucero acorazado fue el buque de la armada francesa Dupuy de Lôme, botado en 1887.1 El mismo año, el buque ruso Ryurik entró en servicio.El primer buque que la mayoría de las fuentes acepta como perteneciente a este tipo fue el crucero acorazado de la Armada Imperial Japonesa construido en los astilleros de River Clyde Chiyoda.2 Los avances del Chiyoda se centraron en la adopción de una maquinaria de vapor vertical de triple expansión.2 A diferencia de las horizontales, que ocupaban todo el ancho del buque, la máquina vertical se podía situar en la zona de la línea de crujía y rodearla con los depósitos de carbón, cinturón blindado y cubiertas blindadas, lo que creaban un área protegida que la mantenía a salvo.2 Aunque el Chiyoda era demasiado pequeño para ser considerado un auténtico crucero acorazado, sentó las bases de lo que sería este tipo de buques.
El último crucero acorazado fue construido en torno a 1910. En esa época estaban cayendo rápidamente en la obsolescencia debido al desarrollo de nuevas tecnologías que permitieron crear los buques de tipo dreadnought, motorizados con turbinas de vapor, y la adopción del fuel oil como combustible, que hicieron que no fueran necesarios los depósitos de carbón, por lo que necesitaban otro tipo de protección. Los cruceros acorazados fueron sustituidos en las flotas por los mayores, más rápidos y mejor armados cruceros de batalla. Los grandes cruceros acorazados quedaron obsoletos y, desde ese momento, solo se construyeron cruceros ligeros y posteriormente cruceros pesados. Los cruceros acorazados existentes se utilizaron desde entonces en tareas de patrulla y tareas secundarias, hasta el final de la Segunda Guerra Mundial.
Crucero acorazado ruso General Admiral de 1873.
Crucero acorazado Chiyoda de 1890)
Ejemplos
Los primeros cruceros acorazados, tenían desplazamientos que oscilaban entre las 6.000 y las 12.000 toneladas con una velocidad entre los 18 y los 20 nudos (entre 33 y 37 km/h). el tipo, alcanzó su cenit entre 1906 y 1908 con desplazamientos de entre 14.000 y 16.000 toneladas y velocidades de entre 22 y 23 nudos (entre 41 y 43 km/h). Su armamento típico consistía de entre dos y cuatro cañones de grueso calibre en los extremos del buque, usualmente de entre 190 y 254 mm (entre 7.5 y 10 pulgadas), y en torno a una docena de cañones de 150 mm (6 pulgadas) en los costados.Crucero alemán Blücher de 1908.
Por ejemplo el Rurik de la Armada Imperial Rusa de 1892, portaba cuatro piezas de 203 mm (8 pulgadas), 16 de 151 mm (6 pulgadas) y 6 piezas de 120 mm (4,7 pulgadas); el francés Victor Hugo, portaba cuatro piezas de 240 mm (9.4 pulgadas) y 16 de 194 mm (7,5 pulgadas). Los numerosos buques de la clase británica Monmouth de 1901 eran la excepción. El diseño hizo un especial énfasis en la protección por sobre otros aspectos; contaba con un armamento uniforme compuesto por catorce piezas de 151 mm (6 pulgadas). Posteriormente, los cruceros acorazados fueron incrementando su armamento; por ejemplo, el británico HMS Warrior de 1905, portaba seis piezas de 234 mm (9,2 pulgadas) y cuatro piezas de 190 mm (7,5 pulgadas; El alemán SMS Blücher de 1909, portaba doce piezas de 210-mm (8.2 pulgadas) y ocho de 150-mm (5.9 pulgadas); y el segundo Rurik construido en 1906 por Vickers) portaba cuatro piezas de 254 mm (10 pulgadas), 8 de 203 mm (8 pulgadas) y 20 piezas de 120 mm (4,7 pulgadas). El buque griego Georgios Averof, de la clase Pisa, construido en Livorno, Italia, contaba con 4 piezas de 234 mm (9,2 pulgadas), 8 de 190 mm (7,5 pulgadas) y 16 de 75 mm (3 pulgadas), y demostró sus cualidades contra la flota otomana en las batallas de Elli y Lemnos.
Cruceros acorazados de la Armada de los Estados Unidos
Brooklyn (1898).
El primer crucero acorazado de la Armada de los Estados Unidos fue el USS Maine, cuya explosión en 1898 provocó el inicio de la Guerra Hispano-Estadounidense. Fue botado en 1889, tenía un blindaje de entre 178 y 305 mm (entre 7 y 12 pulgadas) en su cinturón blindado y de 25 a 101 mm (entre 1 y 4 pulgadas) en su cubierta. Fue rediseñado como acorazado de segunda clase en 1894, en una solución de compromiso, ya que resultaba lento comparado con otros cruceros y débil comparado con los acorazados de primera línea.
El New York, botado en 1895, estaba peor protegido que el Maine, con 76 mm (3 pulgadas) en su cinturón blindado, y entre 76 y 152 mm (entre 3 y 6 pulgadas) en su cubierta blindada. El Brooklyn fue una versión mejorada de los diseños del New York y del Olympia.
Poco después de la guerra Hispano-Estadounidense, la armada de los Estados Unidos construyó seis cruceros acorazados de la clase Pennsylvania, inmediatamente seguidos de los cuatro de la Tennessee. Colectivamente suelen nombrarse estos diez buques como los 'diez grandes'.
La batalla de Tsushima[editar]
Los cruceros acorazados fueron utilizados con éxito en la línea de batalla de la armada imperial japonesa en la Batalla de Tsushima de 1905. De los daños recibidos por los japoneses, el crucero acorazado Nisshin fue el segundo que más impactos recibió tras el acorazado japonés Mikasa. El Nisshin fue impactado en 13 ocasiones, incluyendo un impacto de 228 mm (9 pulgadas) y seis de 305 mm (12 pulgadas). El Nisshin consiguió mantenerse en la línea durante todo el combate, validando de esta manera las esperanzas de sus diseñadores: un crucero capaz de mantenerse en la línea de combate. El rendimiento de los cruceros acorazados japoneses durante la batalla de Tsushima, y especialmente el del Nisshin, crearon un boom en la construcción de cruceros acorazados en las armadas de todo el mundo.
Obsolescencia
El crucero acorazado chileno O'Higgins de 1898 fue el buque insignia de Chile hasta 1931.
Los cruceros acorazados comenzaron a considerarse obsoletos a partir 1907, cuando la Royal Navy introdujo la clase Invincible de cruceros de batalla. El año anterior los británicos habían botado el revolucionario HMS Dreadnought. Los clase Invincible además de la batería de armas de grueso calibre uniforme, poseía una alta velocidad al coste de reducir el blindaje; no obstante, en una comparación con los cruceros acorazados eran más rápidos, estaban mejor blindados y poseían una mayor potencia de fuego.
El último crucero acorazado construido fue el SMS Blücher. Aunque quizás fue el mejor de este tipo de buques se consideró un fracaso, puesto que se construía como respuesta a los clase Invencible y los británicos consiguieron engañar al espionaje alemán en las especificaciones de estos.
Primera Guerra Mundial
Cuando los cruceros acorazados se encontraron con los modernos buques capitales durante la Primera Guerra Mundial, sus deficiencies quedaron claramente expuestas: el SMS Scharnhorst y el SMS Gneisenau fueron hundidos por los cruceros de batalla HMS Invincible y Inflexible en la Batalla de las islas Malvinas. El vicealmirante Maximilian von Spee ya había considerado al buque insignia de la Real Armada Australiana HMAS Australia superior a sus fuerzas, compuesta por cruceros acorazados y cruceros ligeros. En la batalla de las Malvinas, aunque la artillería alemana se mostraba certera era incapaz de infligir daños graves a los cruceros de batalla británicos; cuando estos consiguieron impactar por fin en los buques de von Spee, la batalla quedó sentenciada.La Batalla de Coronel, que tuvo lugar poco antes de la batalla de las Malvinas, fue una de las últimas batallas en la que las principales unidades involucradas en ambos bandos fueron cruceros acorazados. Todos los enfrentamientos siguientes estuvieron dominados por buques tipo dreadnought, acorazados y cruceros de batalla.
Durante la Batalla del Banco Dogger, el SMS Blücher mostró su lentitud al almirante Hipper con respecto al resto de su escuadra, compuesta por cruceros de batalla; Hipper tomó la decisión de sacrificar el crucero acorazado con gran pérdida de vidas para permitir que se salvasen sus unidades más modernas y valiosas.
Los HMS Warrior, Defence y Black Prince fueron hundidos en la Batalla de Jutlandia cuando se enfrentaron a la línea de batalla de la Armada alemana, la cual incluía cruceros de batalla y acorazados tipo dreadnought.
Final de los cruceros acorazados
El Georgios Averof (Clase Pisa) hoy convertido en museo.
El 17 de julio de 1920, cuando la armada de los Estados Unidos adoptó su actual sistema de nomenclatura de unidades navales, todos los cruceros acorazados de los Estados Unidos fueron fusionados con los cruceros protegidos en la clasificación 'CA', eliminándose el término crucero acorazado para referirse a ellos en la US Navy. El Tratado naval de Londres de 1930 entre otras cuestiones abolió el término 'crucero acorazado' y adoptó los términos crucero pesado y crucero ligero, tras lo cual el símbolo 'CA' fue usado para designar a los 'cruceros pesados'.
Uno de los últimos diseños de crucero acorazado ha llegado hasta nuestros días, el Georgios Averof, construido entre 1909 y 1911 que se conserva como buque museo en Grecia.
lunes, 20 de junio de 2016
Introducción: Propulsión independiente del aire (AIP)
Propulsión independiente del aire (AIP)
Wikipedia
La propulsión independiente del aire (AIP en inglés) es un término que abarca las tecnologías que permiten un submarino para operar sin la necesidad de subir a la superficie o utilizar un tubo de respiración a la llegada de oxígeno atmosférico. El término generalmente se excluye el uso de la energía nuclear, y describe aumentar o reemplazar el sistema de propulsión diesel-eléctrica de los buques no nucleares. La Marina de los Estados Unidos utiliza el símbolo de la clasificación del casco "SSP" para designar los barcos impulsados por AIP, conservando al mismo tiempo "SS" para el clásico submarinos de ataque diesel-eléctricos [1].
El AIP se suele implementar como una fuente auxiliar. La mayoría de estos sistemas generan electricidad, que a su vez acciona un motor eléctrico para la propulsión o recargar las baterías del barco. El sistema eléctrico del submarino también se utiliza para proporcionar "servicios de hotel", ventilación, iluminación, calefacción, etc, aunque esto consume una pequeña cantidad de energía en comparación a la exigida para la propulsión.
Una de las ventajas de este enfoque es que puede ser adaptado en los actuales cascos de submarinos mediante la inserción de una sección del casco adicional. AIP normalmente no proporciona la resistencia o el poder para sustituir a la propulsión depende de la atmósfera, pero le permite permanecer sumergidos más de un submarino propulsado más convencional. Una planta típica de energía convencionales proporcionará máxima de 3 megavatios, y una fuente AIP alrededor del 10% de eso. Un submarino nuclear tiene una planta de propulsión que es generalmente mucho mayor de 20 megavatios.
Suministro interior del oxígeno
En 1867, Narcís Monturiol i Estarriol desarrollado con éxito una primera forma de propulsión independiente del aire anaeróbica. [2] [3] En 1908 la Marina Imperial de Rusia lanzó el submarino Pochtovy que utilizó un motor de gasolina alimentado con aire comprimido y agotado bajo el agua.
Durante la Segunda Guerra Mundial la empresa alemana Walter experimentó con submarinos que utilizan peróxido de hidrógeno concentrado como su fuente de oxígeno bajo el agua. Estas utilizaban turbinas de vapor, empleando vapor calentado por la quema de combustible diesel en el vapor y la atmósfera de oxígeno creado por la descomposición del peróxido de hidrógeno por un catalizador de potasio permanganato.
Varios barcos experimentales fueron producidos, y uno, U-1407, que fue echado a pique en la final de la guerra, fue rescatado y reanudación del servicio en la Royal Navy como HMS Meteorite. Los británicos construyeron dos modelos mejorados a finales de 1950, el HMS Explorer y HMS Excalibur.
La Unión Soviética también experimentó con la tecnología y un barco experimental fue construido. El peróxido de hidrógeno fue finalmente abandonado, ya que es altamente reactivo en contacto con diversos metales, es volátil, y los submarinos tenían una alta tasa de consumo. Tanto los británicos y los soviéticos, los únicos países que se sabe a experimentar con ella, la abandonaron cuando Estados Unidos desarrolló un reactor nuclear lo suficientemente pequeña para la propulsión de submarinos.
Fue retenido para la propulsión torpedos por los británicos y la Unión Soviética, aunque abandonado a toda prisa por la siguiente tragedia del HMS Sidon. Tanto ésta como la pérdida del submarino Kursk de Rusia se debieron a accidentes con peróxido de hidrógeno propulsión torpedos.
Motores diésel de ciclo cerrado
Esta tecnología utiliza un motor diesel de submarinos que pueden ser operados convencionalmente en la superficie, pero que también puede contar con antioxidantes, normalmente se almacena como el oxígeno líquido, cuando se sumerge. Dado que el metal de un motor se quema en oxígeno puro, el oxígeno es normalmente diluido con escape reciclado de gas. Como no hay gas de escape al arrancar, el argón se utiliza.
Durante la Segunda Guerra Mundial la Kriegsmarine experimentó con este sistema como una alternativa al sistema de peróxido de Walter, incluida una variante del submarino enano Tipo XXVIIB Seehund, el "Klein U-boot". Fue accionado por un motor Diesel de 95 CV del tipo comúnmente utilizado por el Kriegmarine y que estaba disponible en grandes cantidades, de suministro de oxígeno de un tanque en el barco de quilla explotación 1.250 litros a 4 atm (410 kPa). Se considera probable que el barco habría sumergido un máximo de velocidad de 12 nudos (22 km / h; 14 mph) y un alcance de 70 millas (110 km), o 150 millas (240 km) a 7 nudos (13 km / h; 8.1 mph).
El trabajo alemán se amplió posteriormente a la Unión Soviética que invirtió fuertemente en esta tecnología, el desarrollo de los pequeños submarinos 650 toneladas de la clase Quebec de los cuales treinta se construyeron entre 1953 y 1956. Estos tenían tres motores, dos eran diesel convencionales y uno con ciclo cerrado con oxígeno líquido.
En el sistema soviético, llamado un "sistema de propulsión único", el oxígeno se añadió después de los gases de escape se había filtrado a través de un absorbente químico a base de cal. El submarino también podía correr su diesel usando un snorkel. El Quebec tiene tres motores: un diesel de 900 CV 32D en el eje central y dos M-50P 700 CV diesel en los ejes exteriores. Además uno de 100 CV "Creep" motor fue acoplado al eje del centro. La embarcación podría hacerse funcionar a baja velocidad utilizando la línea central diesel solamente. [4]
Debido a que el oxígeno líquido no se puede almacenar por un largo período de tiempo estos barcos no podían operar lejos de una base. También era un sistema peligroso, por lo menos siete submarinos sufrieron explosiones, y una de ellas, M-256, se hundió tras una explosión e incendio. Ellos fueron apodados muchas veces como "encendedores de cigarrillos". El último fue desguazado en la década de 1970.
El antiguo submarino Tipo 205 U1 de la armada alemana estaba equipado con un unidades experimentales de 3000 caballos de fuerza (2,2 MW).
Turbinas de vapor de ciclo cerrado
El sistema MESMA francesa (Módulo d'Energie Sous-Marine Autonomous) está siendo ofrecido por el astillero DCNS francesa. El MESMA está disponible para los submarinos clase Agosta 90B y Scorpène. Es esencialmente una versión modificada de su sistema de propulsión nuclear con calor generado por el etanol y el oxígeno. Una turbina convencional de vapor de las centrales accionado por vapor generado por la combustión de etanol (alcohol de grano) y el oxígeno almacenado a una presión de 60 atmósferas. Esta presión de disparo permite escape de dióxido de carbono que se expulsa por la borda a cualquier profundidad, sin un dispositivo de escape del compresor.
Cada sistema MESMA cuesta alrededor de $ 50-60 millones. Como instalado en el Scorpène, se requiere la adición de una nueva sección casco del submarino de 8,3 metros (27 pies) y 305 toneladas, y los resultados en un submarino capaz de operar durante más de 21 días bajo el agua, dependiendo de variables como la velocidad, etc [ 5] [6]
Un artículo publicado en la revista Undersea Warfare señala que: "aunque MESMA puede proporcionar una mayor potencia de salida que las otras alternativas, su eficacia inherente es la más baja de los cuatro candidatos AIP, y su tasa de consumo de oxígeno es correspondientemente mayor." [7]
Ciclo de Stirling
El constructor sueco Kockums ha construido tres submarinos de la clase Gotland para la Armada sueca que están equipados con un motor Stirling auxiliares que utiliza oxígeno líquido y combustible diesel para los generadores de 75 kilovatios unidad de propulsión o bien cargar las baterías. La resistencia AIP de los 1.500 barcos tonelada es de alrededor de 14 días a cinco nudos (9 km / h).
Kockums también ha entregado a Japón motores Stirling. Los submarinos japoneses todos los nuevos estarán equipados con motores Stirling. El primer submarino, Sōryū, en la clase se puso en marcha el 5 de diciembre de 2007 y fueron entregados a la Armada en marzo de 2009.
Células de combustible
Siemens ha desarrollado una unidad de celda de combustible de 30-50 kilovatios. Nueve de estas unidades se incorporan al submarino de 1.830 toneladas Howaldtswerke Deutsche Werft AG U31, nave inicial para la clase de Tipo 212A de la Marina alemana. Los otros barcos de esta clase y submarinos equipadas con AIP de exportación de HDW (Tipo 209 mod y Tipo 214) utilizar dos módulos de 120 kW, también de Siemens [8].

Submarinos Tipo 212 de propulsión de pila de combustible de la Marina alemana en el dique
Tras el éxito de Howaldtswerke Deutsche Werft AG en sus actividades de exportación, varios constructores han desarrollado su propio combustible de células unidades auxiliares para submarinos, pero a partir de 2008, los astilleros de otros tiene un contrato para un submarino equipado para ello.
Poder Nuclear
Los reactores nucleares se han utilizado de alimentación a los submarinos durante 50 años, siendo la primera USS Nautilus. Los Estados Unidos, Francia, el Reino Unido, Rusia, la República Popular de China y la India son los únicos países que operan submarinos nucleares. Cinco de estos seis países también tienen puestos permanentes en el Consejo de Seguridad de Naciones Unidas y son los únicos países que declararon poseer armas nucleares de acuerdo con la no proliferación nuclear Tratado. India sólo tiene desde 2009 iniciada la construcción completa de su primer submarino nuclear de construcción nacional. La India en el pasado ha alquilado un submarino de propulsión nuclear de Rusia clase Charlie y planea adquirir dos submarinos de la clase Akula utilizados que se utilizaría con fines de formación. Brasil también se conoce a la investigación de propulsión nuclear para uso submarino. Sin embargo, propulsión independiente del aire es un término normalmente utilizado en el contexto de la mejora del rendimiento de los submarinos propulsados convencionalmente.
No obstante, se han sugerencias para un reactor como fuente de alimentación auxiliar, que puede incluirse en la definición normal de AIP. Por ejemplo, ha habido una propuesta para utilizar un pequeño reactor de 200 kilovatios de potencia auxiliar (estilo de una batería "nuclear") para mejorar la capacidad bajo el hielo de los submarinos de Canadá.
Ver también: la propulsión de barcos nucleares
Producción submarinos AIP no nucleares
A partir de 2009, algunas naciones poseen submarinos AIP no nucleares:
Referencias
Enlaces externos
Underseas Warfare article on AIP
Seapower article
Auxiliary nuclear reactor for Canadian submarines .PDF
Siemens fuel cells for submarines .PDF
Research paper describing Siemens submarine fuel cells .PDF
Traducción: Esteban McLaren
Wikipedia
La propulsión independiente del aire (AIP en inglés) es un término que abarca las tecnologías que permiten un submarino para operar sin la necesidad de subir a la superficie o utilizar un tubo de respiración a la llegada de oxígeno atmosférico. El término generalmente se excluye el uso de la energía nuclear, y describe aumentar o reemplazar el sistema de propulsión diesel-eléctrica de los buques no nucleares. La Marina de los Estados Unidos utiliza el símbolo de la clasificación del casco "SSP" para designar los barcos impulsados por AIP, conservando al mismo tiempo "SS" para el clásico submarinos de ataque diesel-eléctricos [1].
El AIP se suele implementar como una fuente auxiliar. La mayoría de estos sistemas generan electricidad, que a su vez acciona un motor eléctrico para la propulsión o recargar las baterías del barco. El sistema eléctrico del submarino también se utiliza para proporcionar "servicios de hotel", ventilación, iluminación, calefacción, etc, aunque esto consume una pequeña cantidad de energía en comparación a la exigida para la propulsión.
Una de las ventajas de este enfoque es que puede ser adaptado en los actuales cascos de submarinos mediante la inserción de una sección del casco adicional. AIP normalmente no proporciona la resistencia o el poder para sustituir a la propulsión depende de la atmósfera, pero le permite permanecer sumergidos más de un submarino propulsado más convencional. Una planta típica de energía convencionales proporcionará máxima de 3 megavatios, y una fuente AIP alrededor del 10% de eso. Un submarino nuclear tiene una planta de propulsión que es generalmente mucho mayor de 20 megavatios.
Suministro interior del oxígeno
En 1867, Narcís Monturiol i Estarriol desarrollado con éxito una primera forma de propulsión independiente del aire anaeróbica. [2] [3] En 1908 la Marina Imperial de Rusia lanzó el submarino Pochtovy que utilizó un motor de gasolina alimentado con aire comprimido y agotado bajo el agua.
Durante la Segunda Guerra Mundial la empresa alemana Walter experimentó con submarinos que utilizan peróxido de hidrógeno concentrado como su fuente de oxígeno bajo el agua. Estas utilizaban turbinas de vapor, empleando vapor calentado por la quema de combustible diesel en el vapor y la atmósfera de oxígeno creado por la descomposición del peróxido de hidrógeno por un catalizador de potasio permanganato.
Varios barcos experimentales fueron producidos, y uno, U-1407, que fue echado a pique en la final de la guerra, fue rescatado y reanudación del servicio en la Royal Navy como HMS Meteorite. Los británicos construyeron dos modelos mejorados a finales de 1950, el HMS Explorer y HMS Excalibur.
La Unión Soviética también experimentó con la tecnología y un barco experimental fue construido. El peróxido de hidrógeno fue finalmente abandonado, ya que es altamente reactivo en contacto con diversos metales, es volátil, y los submarinos tenían una alta tasa de consumo. Tanto los británicos y los soviéticos, los únicos países que se sabe a experimentar con ella, la abandonaron cuando Estados Unidos desarrolló un reactor nuclear lo suficientemente pequeña para la propulsión de submarinos.
Fue retenido para la propulsión torpedos por los británicos y la Unión Soviética, aunque abandonado a toda prisa por la siguiente tragedia del HMS Sidon. Tanto ésta como la pérdida del submarino Kursk de Rusia se debieron a accidentes con peróxido de hidrógeno propulsión torpedos.
Motores diésel de ciclo cerrado
Esta tecnología utiliza un motor diesel de submarinos que pueden ser operados convencionalmente en la superficie, pero que también puede contar con antioxidantes, normalmente se almacena como el oxígeno líquido, cuando se sumerge. Dado que el metal de un motor se quema en oxígeno puro, el oxígeno es normalmente diluido con escape reciclado de gas. Como no hay gas de escape al arrancar, el argón se utiliza.
Durante la Segunda Guerra Mundial la Kriegsmarine experimentó con este sistema como una alternativa al sistema de peróxido de Walter, incluida una variante del submarino enano Tipo XXVIIB Seehund, el "Klein U-boot". Fue accionado por un motor Diesel de 95 CV del tipo comúnmente utilizado por el Kriegmarine y que estaba disponible en grandes cantidades, de suministro de oxígeno de un tanque en el barco de quilla explotación 1.250 litros a 4 atm (410 kPa). Se considera probable que el barco habría sumergido un máximo de velocidad de 12 nudos (22 km / h; 14 mph) y un alcance de 70 millas (110 km), o 150 millas (240 km) a 7 nudos (13 km / h; 8.1 mph).
El trabajo alemán se amplió posteriormente a la Unión Soviética que invirtió fuertemente en esta tecnología, el desarrollo de los pequeños submarinos 650 toneladas de la clase Quebec de los cuales treinta se construyeron entre 1953 y 1956. Estos tenían tres motores, dos eran diesel convencionales y uno con ciclo cerrado con oxígeno líquido.
En el sistema soviético, llamado un "sistema de propulsión único", el oxígeno se añadió después de los gases de escape se había filtrado a través de un absorbente químico a base de cal. El submarino también podía correr su diesel usando un snorkel. El Quebec tiene tres motores: un diesel de 900 CV 32D en el eje central y dos M-50P 700 CV diesel en los ejes exteriores. Además uno de 100 CV "Creep" motor fue acoplado al eje del centro. La embarcación podría hacerse funcionar a baja velocidad utilizando la línea central diesel solamente. [4]
Debido a que el oxígeno líquido no se puede almacenar por un largo período de tiempo estos barcos no podían operar lejos de una base. También era un sistema peligroso, por lo menos siete submarinos sufrieron explosiones, y una de ellas, M-256, se hundió tras una explosión e incendio. Ellos fueron apodados muchas veces como "encendedores de cigarrillos". El último fue desguazado en la década de 1970.
El antiguo submarino Tipo 205 U1 de la armada alemana estaba equipado con un unidades experimentales de 3000 caballos de fuerza (2,2 MW).
Turbinas de vapor de ciclo cerrado
El sistema MESMA francesa (Módulo d'Energie Sous-Marine Autonomous) está siendo ofrecido por el astillero DCNS francesa. El MESMA está disponible para los submarinos clase Agosta 90B y Scorpène. Es esencialmente una versión modificada de su sistema de propulsión nuclear con calor generado por el etanol y el oxígeno. Una turbina convencional de vapor de las centrales accionado por vapor generado por la combustión de etanol (alcohol de grano) y el oxígeno almacenado a una presión de 60 atmósferas. Esta presión de disparo permite escape de dióxido de carbono que se expulsa por la borda a cualquier profundidad, sin un dispositivo de escape del compresor.
Cada sistema MESMA cuesta alrededor de $ 50-60 millones. Como instalado en el Scorpène, se requiere la adición de una nueva sección casco del submarino de 8,3 metros (27 pies) y 305 toneladas, y los resultados en un submarino capaz de operar durante más de 21 días bajo el agua, dependiendo de variables como la velocidad, etc [ 5] [6]
Un artículo publicado en la revista Undersea Warfare señala que: "aunque MESMA puede proporcionar una mayor potencia de salida que las otras alternativas, su eficacia inherente es la más baja de los cuatro candidatos AIP, y su tasa de consumo de oxígeno es correspondientemente mayor." [7]
Ciclo de Stirling
El constructor sueco Kockums ha construido tres submarinos de la clase Gotland para la Armada sueca que están equipados con un motor Stirling auxiliares que utiliza oxígeno líquido y combustible diesel para los generadores de 75 kilovatios unidad de propulsión o bien cargar las baterías. La resistencia AIP de los 1.500 barcos tonelada es de alrededor de 14 días a cinco nudos (9 km / h).
Kockums también ha entregado a Japón motores Stirling. Los submarinos japoneses todos los nuevos estarán equipados con motores Stirling. El primer submarino, Sōryū, en la clase se puso en marcha el 5 de diciembre de 2007 y fueron entregados a la Armada en marzo de 2009.
Células de combustible
Siemens ha desarrollado una unidad de celda de combustible de 30-50 kilovatios. Nueve de estas unidades se incorporan al submarino de 1.830 toneladas Howaldtswerke Deutsche Werft AG U31, nave inicial para la clase de Tipo 212A de la Marina alemana. Los otros barcos de esta clase y submarinos equipadas con AIP de exportación de HDW (Tipo 209 mod y Tipo 214) utilizar dos módulos de 120 kW, también de Siemens [8].
Submarinos Tipo 212 de propulsión de pila de combustible de la Marina alemana en el dique
Tras el éxito de Howaldtswerke Deutsche Werft AG en sus actividades de exportación, varios constructores han desarrollado su propio combustible de células unidades auxiliares para submarinos, pero a partir de 2008, los astilleros de otros tiene un contrato para un submarino equipado para ello.
Poder Nuclear
Los reactores nucleares se han utilizado de alimentación a los submarinos durante 50 años, siendo la primera USS Nautilus. Los Estados Unidos, Francia, el Reino Unido, Rusia, la República Popular de China y la India son los únicos países que operan submarinos nucleares. Cinco de estos seis países también tienen puestos permanentes en el Consejo de Seguridad de Naciones Unidas y son los únicos países que declararon poseer armas nucleares de acuerdo con la no proliferación nuclear Tratado. India sólo tiene desde 2009 iniciada la construcción completa de su primer submarino nuclear de construcción nacional. La India en el pasado ha alquilado un submarino de propulsión nuclear de Rusia clase Charlie y planea adquirir dos submarinos de la clase Akula utilizados que se utilizaría con fines de formación. Brasil también se conoce a la investigación de propulsión nuclear para uso submarino. Sin embargo, propulsión independiente del aire es un término normalmente utilizado en el contexto de la mejora del rendimiento de los submarinos propulsados convencionalmente.
No obstante, se han sugerencias para un reactor como fuente de alimentación auxiliar, que puede incluirse en la definición normal de AIP. Por ejemplo, ha habido una propuesta para utilizar un pequeño reactor de 200 kilovatios de potencia auxiliar (estilo de una batería "nuclear") para mejorar la capacidad bajo el hielo de los submarinos de Canadá.
Ver también: la propulsión de barcos nucleares
Producción submarinos AIP no nucleares
A partir de 2009, algunas naciones poseen submarinos AIP no nucleares:
- el submarino francés-español de la clase Scorpène (1.700 toneladas) (MESMA)
- la clase S-80 (2.400 toneladas) de la Armada Española
- el Tipo 209-1400mod (1.810 toneladas) alemán (pilas de combustible)
- el submarino Tipo 212 (1.830 toneladas) alemán (pilas de combustible) de la Marina alemana y de la Marina italiana
- el submarino de la clase Tipo 214 (1.980 toneladas) alemán (pilas de combustible)
- el Proyecto 677 Лада (Lada) de Rusia
- el Proyecto 1650 Амур (Amur) de Rusia
- los submarino de la clase Asashio japoneses (2.750 toneladas) (Stirling AIP) de la Fuerza de Autodefensa Marítima de Japón
- el submarino de la clase Sōryū japonés (4.200 toneladas) (Stirling AIP) de la Fuerza de Autodefensa Marítima de Japón
- el submarino de la clase sueca Gotland (1.450 toneladas) (Stirling AIP) de la marina sueca
- el submarino de la clase Södermanland (1.500 toneladas) (Stirling AIP) de la marina sueca
Suecia va a vender sus otros dos submarinos de la clase Västergötland a la Marina de la República de Singapur después de que hayan sido reacondicionados con sistemas AIP Stirling como los submarinos de la clase Södermanland.
- los submarinos chinos de la clase Tipo 041 Yuan (Stirling AIP) de la Armada China
También los constructores navales de varios ofrecer actualizaciones AIP para submarinos existentes:
- Nordseewerke alemán (diésel de ciclo cerrado)
- Kockums (Stirling) de Suecia, propiedad de la empresa alemana ThyssenKrupp
- submarino Agosta 90B de Pakistán hecho con cooperación con Francia
- Scorpene francés realizados por compañía francesa DCNS
Referencias
- [1] United States Navy Glossary of Naval Ship Terms (GNST). SSI es usado algunas veces, pero SSP ha sido declarado el término preferido the preferred por la USN. SSK (ASW Submarine) es el designador para los submarinos clásicos diesel-eléctricos que fueron retirados por la USN en los 1950s, pero continua siendo usado coloquialmente por la USN y formalmente por las armadas del British Commonwealth y corporaciones tales como la Jane's Information Group. [2] Cargill Hall, R. (1986). History of rocketry and astronautics: proceedings of the third through the sixth History Symposia of the International Academy of Astronautics, Volumen 1. NASA conference publication. American Astronautical Society by Univelt, p. 85. ISBN 0877032602 [3] A steam powered submarine: the Ictíneo Low-tech Magazine, 24 August 2008 [4] Preston, Anthony (1998). Submarine Warfare. Brown Books. p. 100. ISBN 1-897884-41-9. [5] www.dcnsgroup.com/files/pdf/Mesma.pdf [6] http://www.defenseindustrydaily.com/india-looks-to-modify-scorpene-subs-with-mesma-aip-propulsion-01954 [7] http://www.defenseindustrydaily.com/india-looks-to-modify-scorpene-subs-with-mesma-aip-propulsion-01954/ [8] Naval Technology - U212/U214 - Attack Submarine
Enlaces externos
Underseas Warfare article on AIP
Seapower article
Auxiliary nuclear reactor for Canadian submarines .PDF
Siemens fuel cells for submarines .PDF
Research paper describing Siemens submarine fuel cells .PDF
Traducción: Esteban McLaren
martes, 4 de agosto de 2015
Radares navales de barrido electrónico
Radares navales de barrido electrónico
Traducción: Iñaki Etchegaray
Los radares de barrido electrónico navales están disponibles desde hace más de 20 años con el AEGIS americano. Ahora están en servicio en las escoltas europeas y deberán ser patrón de los futuros navíos y otros medios. Pero lo que hace estos sistemas caros tan atractivos para la guerra naval?
La parte más crítica de un sistema de guerra antiaérea (AAW) naval es contener ataques de saturación. Estos ataques incluyen aeronaves y misiles antinavio venido de varías direcciones coordinadamente, para vencer las defensas. El enganche de cada blanco por los sistema AAW requiere acompañamiento preciso para que el sistema de control de tiro sea suplido con informaciones adecuadas.
Las antenas convencionales de radar hacen este acompañamiento relacionando los ecos sucesivos de cada blanco. Esta información es hecha en el modo TWS "track-while-scan" y es hecha con cuántos blancos el ordenador del sistema permitir. Cuanto mayor la razón de barrido del radar, mayor la cantidad de información del blanco. La razón de datos es proporcional la rotación de la antena.
La calidad de los datos necesaria pasa a ser alta y necesitando de una rotación muy alta. Blancos en alta velocidad y alta agilidad pasan a ser prácticamente imposibles de enganche. Para blancos la larga distancia, la energía reflejada debe ser grande y para esto la rotación debe ser más lenta. Aumentando la rotación el alcance disminuye. No es posible compatibilizar largo alcance y buena capacidad de control de tiro con antena giratoria.
La respuesta es usar antenas separadas para cada función. Los radares de vigilancia hacen detección de largo alcance y pasa los datos para el radar de acompañamiento para rastreo de alta calidad y operación de control de tiro (iluminación de blanco). Esta solución es adecuada para escenario con blanco único o pocos blancos e inadecuado para escenario de saturación. La capacidad multitargets es igual al número de radares de iluminación y generalmente instalados en pequeño numero (2 por escolta leve y 4 para escoltas pesados).
Un nuevo sistema para operar en un escenario de saturación obviamente no podría ser giratorio. Para tenerse un gran razón de datos el haz de radar debe cambiar de blancos casi instantáneamente lo que es imposible para antena mecánica. Esto sería posible se la antena fuera apuntada electrónicamente con varios transmisores independientes.
El comienzo físico de los radares de barrido electrónico es relativamente simple. Primero tenemos una antena plana compuesta de transmisores regularmente espaciados (phased array o arreglo en fase), todos emitiendo la misma señal. El patrón de cada señal es sinusoidal con amplitud máxima y única. La interferencia entre ellos puede ser grande y esto es intencional y aceptado.
Con la interferencia constructiva la energía electromagnética es máxima cuando están en fase. La región donde forma esta fase puede ser usada para formar un plano dimensional virtual. El vector del lóbulo principal del pulso transmitido es siempre perpendicular al plan del campo electromagnético generado por el transmisor.
Cuando todos los transmisores están en la misma fase (como en la antena mecánica), el plan del campo electromagnético es paralelo a lo de la antena, y el lóbulo principal será apuntado directo para frente. Cambiando la orden de transmisión, o alterando la fase, con un pulso inmediatamente el frente y otros más para atrás, el plano electromagnético gira y el lobulo principal es apuntado hacia otra dirección. Por ser hecho electrónicamente, el giro es prácticamente instantáneo.
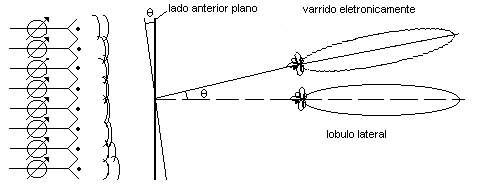
Princípio de funcionamento de los radares de arreglo en fase.
Las antenas de radar mecánicas usan este principio con varías guías de ondas, cada una como elemento transmisor independiente. Cambiando la fase es posible alterar la dirección vertical para obtener datos de altitud, pero el barrido horizontal depende de la rotación de la antena. Un ejemplo es el APY-1/3 de lo Y-3 Sentry y la mayoría de los radares 3D de la US Navy como el SPS-48 . Esta medida es un paso provisional debido al alto coste y al nivel inmaduro de tecnología. Con la disminución de los costes pasó a ser más viable el uso de múltiples elementos para barrido horizontal y vertical.
La capacidad de obtener una gran razón de datos de un gran número de blancos la gran distancia no es la única ventaja de las antenas de barrido electrónica. Debido a cambio del haz casi instantáneo, un único radar puede hacer varios funciones simultáneamente. Por ejemplo, vigilancia de inmediatamente alcance, acompañamiento de blancos sospechosos con baja razón de acompañamiento, acompañamiento de blancos enemigos con alta razón de datos e iluminación de blancos. Estas funciones necesitarían de una cooperación sin fallo de varios radares de barrido mecánica. El resultado puede ser la disminución del número de sensores.
Durante la detección de un blanco en potencia, un radar de barrido mecánico espera algunos retornos para correlacionar, por lo menos dos, y extraer el curso y velocidad, para reiniciar un nuevo proceso de acompañamiento.
Dependiendo de la tasa de actualización, es gasto en tiempo valioso en la detección de blancos enemigos. Si el blanco consigue negar algunos barridos durante el acompañamiento, como bajar en el horizonte o la aparición de obstáculos, el acompañamiento tendrá que ser reiniciado con nuevos atrasos.
Algunos radares tiene memoria de acompañamiento para disminuir este problemas, y se pierden el acompañamiento, ellos mantiene la búsqueda en la dirección esperado para intentar readquirir el blanco, pero sólo funciona por poco tiempo. Realizando enmascaramiento del terreno, interferencia o "beaming", los blancos enemigos pasan a tener buena oportunidad de que se aproximen sin que sean acompañados y enganchados.
Los radares de barrido electrónico pueden iniciar el acompañamiento inmediatamente con la detección del blanco reposicionando el haz de radar inmediatamente en vez de esperar una barrida. A pesar de que también pudieran ser entorpecidos por las mismas técnicas de quiebra de acompañamiento, ellos pueden contener más fácilmente. Por ejemplo, para el haz principal puede ser instruído para aumentar su tiempo barriendo el punto donde la amenaza fue detectada, disminuyendo tiempo de barrido de otros blanco menos amenazadores, para el caso de reaparecezca y ser rápidamente detectado.
Los radares convencionales crean lóbulos secundarios además del lobulo principal. Estos lobulos son altamente indeseables por que sean útiles para el reconocimiento electrónico enemigo y fuente de vulnerabilidad de interferencia. Los radares de barrido electrónico producen pequeños lóbulos laterales y son menos vulnerables de explorar.
Las antenas convencionales son vulnerables la vibración y difíciles de mantener y operar. Los radares de barrido electrónico tiene pocas partes moviles y no vibran. Son más fáciles de estabilizar en relación al movimiento del navío. Las antenas convencionales tiene mecanismos complicados de estabilización que son difíciles de mantener.
Los radares convencionales tiene varias fuentes de fallo. Si el servomotor de la antena falla el radar se para. Si el estabilizador fallo, la unidad de acompañamiento se degrada. Si la antena tiene fallos en la forma deja de tener utilidad. Los radares de barrido electrónico fallan, pero tiene construcción modular y pueden fallar en algunos módulos sin problemas, aún por fragmentos de un misil anti-radar, pero continúa con capacidad reducida.
Las antenas de barrido mecánico son proyectadas con un conjunto de requerimientos operacionales que direccionan especificaciones técnicas. El radar irá a transmitir un pulso con cierta energía y frecuencia, un cierto PRF y con un haz de cierto rango. El tamaño y forma de la antena depende de este requerimientos y girará a cierta velocidad. El hardware tendrá que ser alterado si el adversario usr una nueva técnica de interferencia o lo retorno de la costa o mar fuere mayor que el esperado, o la razón de datos fuere mayor que el necesario, o si el uso operacional mostrar que estas especificaciones son inadecuadas.
Los radares de barrido electrónico tiene limitaciones físicas como potencia de transmisión, cobertura de barrido pero son muy flexibles en los límites operacionales. Sus características técnicas son direccionadas por software y el hardware puede ser modificado para ajustarse al ambiente. Un sistema controlado por software también aumenta la flexibilidad táctica de su empleo operacional. El haz puede ser alterado en el campo para adaptarse la situación táctica en vez de considerar los datos de inteligencia.
Las antenas formadas con varios módulos transmisores en un único receptor son llamados Passive Electronic-scan Arrays. El próximo paso son módulos transmisiones/receptores (TRM) y llamados Active Electronic-scan Arrays (AESA). Los radares AESA necesitan de mucho más integración de electrónicos y son más caros de desarrollar.
Lo beneficio claramente justifica los costes y complejidad. En vez de formar un único haz y apuntarlo, la presencia de varios TRM permite formar varios haces independientes y cada uno con una tarea. En vez de tener un único haz con tareas divididas en el tiempo como vigilancia, acompañamiento, control de tiro etc, y saltar de un blanco para otro, es posible considerar un haz constante para cada blanco y otras tareas siendo realizadas por otros haces. Esta capacidad multifuncional abre otra capacidades como transmitir dos señales o más complemente diferentes y usar como interferidor potente. Un radar AESA usan menos potencia y cada TRM tiene un pequeño pulso electromagnético con los haces siendo formados con la intersección de los pulsos.
Otras ventajas ahora más entendidas son la redundancia, resiste más a daños de batalla, tiene menos piezas de reposición, bajo coste de los TRM y coste ciclo de vida. Los radares convencionales tiene limitación de potencia, y el TRM no y pueden se múltiples. El bajo voltaje también hace más bajo para mantener. Los costes llegan la mitad de un radar convencional con menos tripulación y menos tamaño para economía.

Capacidades de un radar naval multifuncional con tecnologia de arreglo en fase.
El principio de los radares de arreglo en fase (phased arrays) está en uso desde la Segunda Guerra Mundial. Los mayores avances en la teoría y tecnología fueron conseguidos en las décadas de 50 y 60. El uso operacional ocurrió en la década de 60 y 70. Esto ocurrió debido a tecnología de controladores de fase computación para control.
Aunque la mayoría de los radares de arreglo en fase tenga la apariencia del SPY-1, no todos son así. Otros ejemplos son los radares de alerta de misiles americanos con tamaño de edificio de 10 pisos, o radares OTH como el Jindalle australiano y RIAS francés este último con antena circular omnidirecional.
Las antenas de arreglo en fase también tiene otras aplicaciones como equipar cazas, radares de búsqueda en tierra, comunicaciones por satélite e interferencia electrónica. En 2003 la QinetQ británica inició la prueba de radares de arreglo en fase en misiles para mejorar la capacidad de contra contramedidas electrónicas (ECCM).
AEGIS

Desde la Segunda Guerra Mundial la US Navy viene desarrollando tácticas y sistemas para protegerse de ataques aéreos. Después de la Segunda Guerra Mundial varias generaciones de misiles anti-navío aparecieron para unirse a la amenaza aérea. El primer navío hundido por uno de estos misiles fue el destructor israelí Eilat hundido por misiles Styx rusos disparados de lanchas lanza-misiles egipcias en octubre de 1967.
La amenaza fue confirmada en abril de 1988 cuando dos navíos iraníes disparan contra navíos americanos en el Golfo Pérsico. En el cambio de misiles una fragata iraní y una corbeta fueron destruidas por misiles Harpoon americanos.
La estrategia para defenderse de estas amenazas, que pueden atacar desde larga distancias, a partir de mar, tierra, aire y submarinos, coordinados con otros medios, y alcanzando simultáneamente el blanco, fueron las tácticas de defensas en capa. Los cañones fueron sustituidos por la primera generación de misiles superficia-aire.
Operaciones en el litoral requiere la capacidad de defenderse de 5-10 misiles con alerta de 30 segundos, junto con amenaza aérea y de superficie, interferencia y ruido de fondo. Los blancos pueden estar volando bajo, realizando maniobras "pop-up", misiles balísticos y blanco furtivos.
SPG-59/Typhon
La primera tentativa de hacer un radar de barrido electrónico fue en 1958 con la US Navy desarrollando un sistema de guerra antiaérea (AAW) llamado Typhon que daría capacidad multi-blancos para los sistemas de misiles Terrier Tartar y Talos. Estos sistemas no fueron proyectados para contraponer la amenaza de bombarderos y misiles de la aviación naval soviética en ataque de saturación.
La solución de la época era un modo de guia de tipo "track-vía-missile/" (TVM), usado posteriormente en el Patriot terrestre, donde la señal de radar era recibido por el misil, pero repasado y procesado en el navío que tenía mucha más capacidad de procesamiento. La estructura del sistema necesitaba de un radar capaz de desempeñar varías tareas como control de tiro e iluminación terminal de varios contactos simultáneamente. El corazón del sistema sería el radar de barrido electrónico SPG-59 junto con un misil capaz de interceptar blancos a 200km.
Luego en el inicio de las investigaciones las dificultades comenzaron a aparecer. No había tecnología disponible y los módulos TR eran muy caros. La búsqueda de módulos TR era baja para satisfacer la producción masiva y los módulos eran poco confiables. El coste de una única antena era muy caro y consumiría mucha energía sólo siendo viable en navíos nucleares. El programa fue cancelado en diciembre de 1963.
Los radares SPG-32 y SPG-33 fueron lo próximas tentativas de la USN de hacer un radar de barrido electrónico con los requerimientos relajados. La iluminación de blancos para misiles con guiado de radar semi-activa pasó a tener directores dedicados y continuó a ser usado un radar de vigilancia convencional mientras el SPG-59/Typhon sería el único radar a bordo.
Los requerimientos de acompañamiento preciso de varios blancos continuaba y eran complicados con la capacidad de contra-contramedidas de las escoltas de las aeronaves soviéticas. Los costes de los electrónicos disminuyó en una década pero aún eran caros. Los transistores aún no aparecieron en producción masiva y continuarían a usar válvulas. Aún así los radares fueron instalados en el Nae Enterprise y en el crucero Long Beach.
Estos sistema fueron instalados en navíos nucleares y eran bien pesados. Como el SPG-59, el sistema SCANFAR consumía muchísima energía y era una de las flaquezas de los sistema. La antena era muy pequeña y en un navío menor crearía problemas de estabilidad, o sería instalado próximo a la línea d'agua, disminuyendo su eficiencia.
En el Enterprise el radar daría una visión aérea clara actualizada instantáneamente. Durante el desarrollo fue percibido que cada sistema de vigilancia de área y acompañamiento de blanco necesitaría de características de fajo diferente. Esto resultó en el uso de dos antenas de forma diferente: El SPG-32 era rectangular para vigilancia aérea y el SPG-33 tenía un conjunto de cuadrados posicionado verticalmente para acompañamiento de blancos. Eran cuatro antenas en par cubriendo 90 grados cada.
El sistema mostró ser insatisfactorio durante su carrera. Aún cuando funcionaba, el sistema era incapaz de dar los beneficios prácticos esperados. Esto se debía más a los sub-sistemas analógicos o analógicos/digitales usados. Las dificultades de mantenimiento también era consideradas superiores a los beneficios operacionales. Las antenas del Enterprise y Long Beach fueron retiradas en el fin de los años70 e inicio de los años 80 y sustituidas por sistemas convencionales.

El crucero nuclear CGN-9 Long Beach fue equipado con el radar de barrido electrónico SPS-32 Scanfar, dos lanzadores dobles Terrier con 120 misiles y un lanzador doble Talos con 52 misiles. Fue propuesto para convertirse en AEGIS entre 1978 y 1981. El proyecto fue cancelado debido a edad del navío. En 1979 el Talos y SPG-59 fueron retirados. En 1983 el sistema Terrier fue sustituido por el Standard SM-1 y dos Phalanx.

En 1958 fue iniciado el proyecto de un nuevo misil para sustituir el Talos, Terrier y Tartar que mostraron ser fácilmente saturado por ataque masivo. La razón de tiro era limitada a lo numero de radares iluminación. En 1958 escogido la guiado TVM con la señal de radar recibido por el misil, repasado para el navío donde era procesado que tendrían muy más capacidad de computación y usaría el radar SPG-59 de barrido electrónica. El misil fue llamado originalmente de Super Talos/Super Tartar, y para evitar confusión fue llamado de Typhon. El RIM-50A Typhoon LR pesando 9.070kg y alcance de 320km sustituiría el Talos y RIM-55A Typhon MR con alcance de 46km sustituiría al Terrier y Tartar. Los misiles tendrían radar activo y propulsión ramjet. Fueron considerados caros y complejos y cancelados en 1963 sin pasar de la fase de proyecto. A US Navy inició el proyecto de la familia Standard. La foto es del Typhoon LR.
Sistemas de Armas AEGIS MK-7 - SPY-1
En el fin de los años 60, fue percibido que el tiempo de reacción, potencia y disponibilidad de los misiles de la familia Terrier ya no era suficiente. Así surgió el requerimiento del Advanced Surface Missile System (ASMS), y renombrado AEGIS en diciembre de 1969.
El AEGIS fue proyectado como un sistema de armas completo, de la detección hasta la destrucción del blanco para defender a cuadra de misiles anti-navíos, principalmente como una respuesta a la táctica soviética "carrier killer" de saturación con misiles anti-navío.
El sistema de armas AEGIS es un sistema de armas superficie-aire integrado. Fue proyectado para defender la flota contra cualquier amenaza aérea. El AEGIS es responsable por la defensa de aérea para grupo batalla y compila el cuadro aéreo para cazas que se concentran en la batalla aérea externa. Con modernizaciones posteriores el AEGIS pasó a ser el sistema de defensa anti-misiles balísticos primario de la US Navy.
Los componentes principales del sistema: misil y sistema de lanzamiento (Versiones del Standard y el lanzador MK26), Command and Decision System, Weapons Control System, antena de barrido (la famosa antena plana AN/SPY-1A) y sistema computacional asociado y el sistema de comando y control.
El AEGIS fue desarrollado a partir del sistema Typhon para ser instalado en grandes fragatas, aprovechando tecnologías, como los radares de barrido electrónico SPG-59 junto con el programa Talos y Tartar.
En 1968 fue suscrito un contrato con Boeing/General Dynamics y RCA para desarrollo y pruebas del sistema.
La RCA Electronics, que pasó para la General Electric y ahora parte de la Lockheed Martin, recibió un contrato inicial para desarrollar el AEGIS y su componente más importante, el radar de barrido electrónico SPY-1, en 1969. El radar iría a cooperar con el nuevo misil superficie-aire RIM-66 Standard que estaba entrando en servicio masivo.
Las lecciones del Typhon y SPS-32 SCANFAR serviría para que los investigadores piensen en el mundo real con un sistema útil. Desde lo inicio fue pensado en integrar todos los sistema digitales de control y manipulación del haz principal y del procesamiento de la señal recibida. Esto aseguraría que el sistema funcionaría como anunciado. La antena también sería muy leve y consumía menos energía. Fue hecha una separación clara entre hardware y software para facilitar las modernizaciones de largo plazo. Fue dado énfasis el mantenimiento y confianza, aún sacrificando el desempeño.
El sistema inicial fue instalado por primera vez en el navío prueba AVM-1 Norton Sound en 1974. El navío también recibió módulos de todo el sistema como el CIC y radares de iluminación de misiles. En 1975 lo corrió la primera prueba del sistema con un misil Talos modificado siendo abatido por un misil Standard .
El enganche de blancos múltiples fue demostrado en 1977. El navío disparó dos misiles Standard RIM-66C contra dos drones BQM-34. Los misiles no fueron iluminados todo el tiempo como en los SAM navales anteriores. Fueron disparados inicialmente en dirección a un punto en su y guiados hasta allá con su INS. Después recibieron actualización de medio curso de la posición del blanco del radar SPY-1. Los blancos fueron iluminados por el SPG-62 dividiendo el tiempo entre los de los blancos. Los dos blancos fueron derribados.
Entre 1974 y 1980 fueron realizadas pruebas y mejorías en los sistema. La adopción de nuevos ordenadores aumentó en mucho el desempeño y confianza. La prontitud nunca era menor que un 96%.
Desde lo inicio de las pruebas había dudas sobre como el sistema sería usado. Una propuesta era de un destructor para uso masivo y con bajo coste y capacidad limitada. Esto causaría divergencia entre la capacidad prometida y el poder aparentemente limitado del nuevo navío.
Fue estudiada la instalación del AEGIS en los cruceros nucleares de la Clase Virginia (CGN-38), pero los plazos de entrega y otras consideraciones hicieron impracticable. Después fue estudiado un crucero de ataque nuclear (CSGN) para el inicio de la década de 70. Los dieciséis CSGN serían usados a los pares para escoltar cada uno de los ocho NAe nucleares americanos. Esto significa que los AEGIS serían navíos poco numerosos y la tecnología no sería usada como querían.
Con la cancelación del CSGN, finalmente fue adoptado una versión mayor del destructor Spruance con AEGIS y dos lanzadores MK-26, después sustituidos por el VLS Mk-41 de lanzamiento vertical. Estos navíos fueron clasificados como cruceros, llamados de clase Ticonderoga, y entraron en operación en 1983.
El AEGIS es un sistema de sistemas. El corazón del AEGIS es el radar AN/SPY-1 de barrido electrónico que hace búsqueda, detección, acompañamiento y control y guiado de misiles simultáneamente.
Los otros elementos son el Mk 99 fire control directors (radar SPG-62), Command and Decision System, Fire Control System, Weapons Control System, Operational Readiness and Test System, Aegis Combat Trainer System, y Aegis Display System.
El SPY-1 es capaz de detectar y acompañar centenares de blancos de más de 350km, los clasificas, pudiendo enganchar varios al mismo tiempo, más de 20, separadamente, con los misiles SM-2 Standard. El tiempo de reacción medio en segundos supera en mucho los radares giratorios. El radar también es capaz de detectar blancos de superficie y balísticos.
El radar SPY-1 no debe ser descrito sin considerar el contexto de todo el sistema que apoyo. El radar opera en la banda S (3,1-3,5 GHz) y usa cuatro antenas de barrido electrónico pasiva tiene forma octogonal plana midiendo 3,65x3,65m cada. El fajo tiene cerca de 1,7x1,7 grados. La versión inicial SPY-1A tenía 4.480 elementos agrupados en 32 grupos de transmisores.
Los elementos transmisores tienen 132W de pico de potencia. La potencia media es de 58KW y la potencia máxima llega la 4-6 MW. Un radar de búsqueda rotatorio genera cerca de 1 MW en la misma banda.

En la foto, de un crucero Ticonderoga, es posible ver la antena de la proa. Existe otra tres en las laterales y una otra por encima del hangar del helicóptero, en la superestrutura de red. Con esa disposición, el navío posee una cobertura de 360º continua. Cada antena cubre 90 grados. El alcance es de 300 km para búsqueda aérea y cerca de 80km para búsqueda en el horizonte. El coste total del programa AEGIS fue de US$ 42,7 mil millones de dolares.
El centro del sistema Mk7 Mod3 era compuesto de 16 supercomputadores UYK-7, un servidor UYK-19 y 11 minicomputadores UYK-20, todos de la Unisys. Los módulos de computación eran agrupados físicamente juntos para formar una unidad procesadora única con interfaz con pantalla a color Hughes AN/UYA-4 y cuatro otros menores PT-525. El sistema fue limitado a mostrar 128 blancos para evitar saturación y puede ser aumentado en combate. Los últimos modelo usan ordenadores comerciales con más de mil veces la capacidad de procesamiento original.
En el modo automático, los ordenadores tiene total autoridad de los sensores del navío y armas y también de varios navíos próximos subordinados al control del navío vía NTDS u otros sistemas de datalink compatible. La estructura del sistema es compatible con los protocolos NTDS y cambio datos veía Link 11 y Link 16.
La principal diferencia con la próxima versión SPY-1B era la adición de un modo de alta elevación para acompañar misiles la gran altitud como lo Las-4 y Las-6. Nuevos modelos más compactos disminuirían el peso total (cada uno pasó de 5,44kg para 3,56kg por módulo TR). Esto también resultó en la disminución del número de elementos en el subgrupos y la formación de fajos más angostos. Nuevos ordenadores UYK-43/44 fueron instalados con mayor capacidad de procesamiento. Aún con la reducción del consumo de energía los Ticonderoga perdían cerca de 2.000 millas de alcance cuando el SPY-1 transmitía continuamente.
En 1980 fue percibido que navíos menores con capacidad AEGIS ya era posible con la tecnología disponible y manteniendo la misma capacidad. Un navío menor tendría casco con avances para mantener las calidades marineras y disminuir la firma IR y RCS. Así surgió la clase DDG-51 con el primer navío comisionado en 1991.
La nueva clase de destructores DDG-51 Arleigh Burke tiene un desplazamiento inferior comparado con los DDG-47 Ticonderoga y recibieron el modelo SPY-1D. Cada transmisor pesaba 1,91 kg. El SPY-1D también fue instalado en los destructores Kongo japoneses y en las fragatas F-100 españolas.
El SPY-1D(V) fue modernizado para operar en el litoral con mejor capacidad contra misiles crucero furtivos volando bajo y ruido de fondo pesado en la presencia de interferencia electrónica pesada. El SPY-1D(V) fue instalado en los DDG-51 Flight IIA iniciando en 1998.
Las versiones más reciente SPY-1F y SPY-1K son más ligeras y con área menor y proyectadas hacia exportación. El SPY-1F fue seleccionado para las cinco fragatas F-310 noruegas. El SPY-1K es aún más compacto y debe ser usado en fragatas y corbetas. Las versiones menores no tiene capacidad anti-misil balístico

Fragata española F-100 Alvaro de Bazan equipada con AEGIS
A pesar de las incontables ventajas el SPY-1 tenía algunos puntos débiles. El AEGIS fue proyectado para operar en el mar abierto y en el litoral, sin embargo, fue configurado para mirar por encima del terreno para evitar blancos falsos en exceso. Esta configuración puede aumentar la susceptibilidad contra blancos volando bajo. Otro problema es que después de disparar una salva, el blanco no será reenganchado hasta ser confirmado su destrucción. Como el radar es instalado relativamente bajo y no en un mástil, el horizonte radar es menor. Los DDG-51 tampoco tiene un radar de búsqueda secundario AN/SPS-49 como los Ticonderoga.
El AEGIS ya fue probado en combate, pero sólo para disparar misiles Tomahawk. En 1980 el crucero USS Vincennes (CG-49) disparó un misil Standard contra un Airbus pensando que era un F-14 iraní. En otra ocasión un otro Ticonderoga abrió fuego contra nubes pesadas pensando ser un ataque aéreo.
Las versiones bases del sistema AEGIS son:
 Baseline 1 (CG-47 al CG-58) con SPY-1A.
Baseline 1 (CG-47 al CG-58) con SPY-1A.
Baseline 2 (CG-52 la CG-58) con VLS Mk-41, Tomahawk y mejorías en las capacidades ASW.
Basline 3 (CG-59 al CG-64) usa el AN/SPY-1B con consola AN/UYQ-21.
Baseline 4 (CG-65 al CG-73) usa ordenadores AN/UYK-43/44 con programas del DDG-51. Forma la base del DDG-51-67.
Baseline 5, introducido en 1992, incluye JTIDS, Link 16, Combat Direction Finding, Tactical Data Information Exchange System, AN/SLQ-32(V)3 Active Electronic Counter Countermeasures, y el AEGIS Extended Range (ER) Missile.
Baseline 6 tiene capacidad antimíssil balistico (TBMD) y enganche cooperativo (CEC). Será equipado con ESSM y sistema de identificación modernizado, entre otros.
Baseline 7 está equipado con AN/SPY-1D(V), Standard-2 Block IIIB y Advanced Integrated Electronic Warfare System (AIEWS).
SPY-3
La US Navy planea instalar un radar multifuncional (MFR) en sus futuros navíos basado en tecnología AESA.
El programa de desarrollo de tecnología Multi-Mission Receive Shared Aperture (MMRSA) para el destructor DD(X) fue iniciado en 2001 para desarrollar un radar de la banda banda H/I/J (6-18 GHz).
Eran dos configuraciones posibles en la forma del AN/SPY-2 operando en la banda Y/F de la Lockheed Martin. Costaría US$ 125 millones cada o US$ 100 millones sin capacidad contra misiles balísticos.
El otro programa sería un radar AESA de la banda I/J de medio alcance de la Raytheon apoyado por un radar de búsqueda de volumen tridimensional (3D) Volumen Search Radar (VSR). El VSR tendría coste de desarrollo de US$100-150 millones con antena de 3,6m de diámetro con tecnología de arreglo en fase equipada con 240 módulos de 140W cada y 730 receptores. El alcance de búsqueda sería de 400km. Costaría US$ 10 millones cada.
El MFR costaría US$ 200-300 millones para desarrollar y sería optimizado para defensa contra misiles de crucero antinavio volando muy bajo. Tendría 24 mil TRM y variantes menores para NAes y navíos anfibios. El coste unitario sería de US$ 30 millones cada o menos para variante de 4 mil elementos. Sería capaz de detectar periscópio, misiles, iluminar blancos, y realizar búsqueda y acompañamiento de blancos.
La US Navy estudió la propuesta del APAR Mk 2 que equiparía el DD(X) y la fragata alemana F-125.
La Raytheon fue escogida e irá a equipar el CVN-77 y DD(X). La entrada en operación está prevista para 2008 con DD(X). El radar dirigirá los misiles ESSM y SM-2/3 Standard, además de proyectos futuros. Si llamará AN/SPY-3 Multi-Function Radar (MFR) operando en la banda X.
El MFR será suplantada por un radar de búsqueda de volumen que substiturá los SPS-48Y, SPS-49, SPN-43, SPS-67, Mk23 TAS y Mk-95 pudiendo ser instalado en navíos antiguos
En junio de 2003 la Raytheon Integrated Defense Systems entregó la primera antena SPY-3 para pruebas en la US Navy.

DD(X)

CVN-78
APAR
El Active Phased Array Radar (APAR) es el radar del sistema de Guerra Antiaérea (AAW) del programa Tripartite Frigate Cooperation (TFC-AAW). El sistema incluye también al radar SMART-L de vigilancia aérea y lanzadores verticales Mk-41 VLS para misiles SM-2 Standard y ESSM.
El APAR será el primero de una nueva generación de radares marítimos. Usa tecnología del programa de demostración EXPAR (Experimental X-band/ Phased Array Radar) de la TNO-HIEL/Signaal de 1989.
El programa fue iniciado en 1993 y adoptado en 1994 como parte del sistema AAWS Anti-Air Warfare System (AAWS) para las fragatas F-124 alemanas, Die Zeven Provincien (LCF - Luchtverdedigings ein Commando Fregatten) holandesa y la F-100 española. España salió del programa y Canadá entró posteriormente.
El sistema completo TFC-AAW fue desarrollado por un consorcio formado por la Thales holandesa (ex Signaal), Northen Telecom, EADS, Euroatlas, Comdev, Stork Canada y varias subsidiarías de la Lockheed Martin y Thales.
El contrato inicial de US$125 millones con la Hollandse Signaalapparaten fue hecho en 1995 para desarrollar el radar. La Signaal es líder del proyecto y responsable por la ingeniería del sistema, gerencia del programa, unidades de procesamiento, proyecto de la antena y fabricación. La DASA fabrica las unidad procesamiento, generador de ondas. La Epro, Sican y Euroatlas alemanas hacen el suministrador de energía. Canadá participa con Northern Telecom que produce los TRM.
Fueron encomendados siete radares APAR para Holanda (4) y Alemania (3) para fragatas clase De Zeven Provincien LCF y F-124 Sachsen. Los siete radares encomendados costaron US$200 millones. La Tortehn Telecom recibió un contrato de US 91 millones para fabricar los TRM.
La influencia americana es obvia debido a configuración de cuatro antenas fijas. Pero tambien las diferencias son varías. El APAR usa un radar AESA al contrario del barrido pasivo. El AEGIS necesita de iluminación SARH para guiado terminal mientras el APAR guía el misil del lanzamiento hasta el impacto. Esto significa una operación en frecuencia más alta para dar precisión final.
El APAR opera en la banda I (8-10 GHz). La banda I fue escogido para detección en el horizonte en vez de alcance y es compatible con los misiles ESSM y SM-2. El alcance nominal es menor pero con mayor precisión de acompañamiento. La resolución de largo alcance es de menos de 1 metro y puede usar técnicas de reconocimiento de blancos no cooperativos (NCTR). El radar mapea el litoral para relacionar retornos y evitar señales espurias.
Cada antena tiene 3.424 elementos, controladas en cuatro antenas de 856 elementos en 64 columnas. Cada antena hace barrido de 70 grados de elevación y 120 grados en azimut cubriendo 360 grados y con sobreposiçión entre ellas. Cada antena tiene su propio procesador de señales, unidad de procesamiento de datos y dos usan el mismo sistemas de gerencia y acompañamiento.
El sistema puede formar más de 1.000 haces independientes para varias funciones simultáneamente o sea produce más de 500 haces por segundo. Los modos originales incluyen búsqueda en el horizonte, acompañamiento de blancos múltiples, apoyo de guiado de misiles (SARH), apoyo de fuego naval, búsqueda de punteria, búsqueda de volumen de back-up y búsqueda y acompañamiento de superficie.
El desempeño publicado cita alcance contra blancos volando bajo de 75 km, acompaña hasta 250 blancos a 150 km para acompañamiento monopulso de 250 blancos y búsqueda de superficie de 32 km. Hasta 16 blancos pueden ser enganchados simultáneamente con 32 misiles en el aire del tipo RIM-7P, SM-2 MR Block IIIA/B, SM-2 ER Block IVA o ESSM. En la iluminación final, el radar usa modo de iluminación de onda continúa intermitente (ICW).
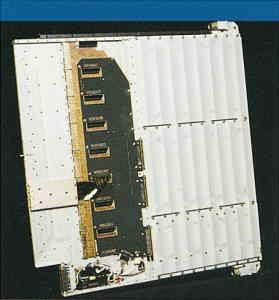
Cada columna del radar tiene ocho TRM.
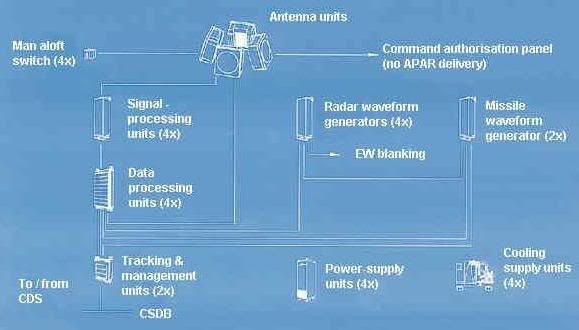
Arquitectura del APAR.
El radar pesa 20 toneladas siendo mitad del mástil. Cada antena pesa 2 toneladas. Los TRM tiene 5W de potencia pudiendo producir hasta 85KW por faz. El radar puede perder un 5% sin degradar el desempeño. La antena es protegida con tejido Teflon bajo presión y refrigerado a liquido por ser más eficiente.
España salió del proyecto y escogió el radar SPY-1D en 1995, para equipar sus fragatas F-100.
Canada debe equipar cuatro fragatas Halifax para la modernización de media vída después de 2005. Los estudios iniciales indicaron que necesitará de lastre con ganancia de 105 toneladas o un "plug" de 10 metros para acomodar el nuevo sistema. Durante la construcción de la clase estaba previsto que el segundo lote debería ser aumentado pero fue abandonado en el proyecto. Esta extensión ahora volvió a ser pensada.
El APAR fue propuesto para el programa TF2000 turco, KDX-3 de Corea del Sur. La fase 4 del Warfighting Improvement Programme (WIP) o proyecto SEA 1348 australiano para modernizar las fragatas ANZAC prevé un radar de barrido electrónico de cuatro faces para dar capacidad antimisil alrededor de 2004
La US Navy estudia un radar multifuncional desde 1996 con el proyecto Akcita para radar banda I entre otros y el APAR es una de las propuestas.
El APAR puede ser instalado en navíos de hasta 1.500 toneladas con cuidados para peso en las partes altas. Una versión menor en 2005-2010 fue planeado. Existen estudios de una antena de tres faces con mitad del tamaño capacidad de controlar misiles y cañones o una antena rotativa sin capacidad de iluminar blanco.

El APAR será auxiliado por el SMART-L para búsqueda de volumen.

Fragata alemana F-124.

Fragata holandesa De Zeven Provincien.
El SEAPAR (Self-defense ESSM Active Phased-Array Radar) operando en la banda I/J fue propuesto para control de tiro del misil ESSM por la Raytheon y Thales a partir de 2006. El SEAPAR usaría tecnología del SPY-3 y APAR por esto sería llamado "baby APAR" o "baby SPY-3". El peso sería de 25-un 30% del APAR. Tendrá 3 o 4 faces y debe ser capaz de enganchar 4 blancos simultáneamente con 8 misiles en el aire a través de guiado por onda continua intermitente y datalink. Hace búsqueda en el horizonte a 30 km y búsqueda de volumen limitada la gran elevación.

El SEAPAR fue propuesto para navíos menores que fragatas.
El ESSM está previsto para ser instalado en más de 250 navíos. El ESSM es una modernización cinemática del RIM-7P de la OTAN en servicio desde 1991. El ESSM es capaz de maniobrar la 50g y tiene alcance de 30km y vectoriamento de empuje (TVC).
El SMART-L, parte del sistema AAWS, es un radar 3D de búsqueda de volumen que opera en la banda D volumen búsqueda, alerta anticipado, control de cazas, defensa de área y auto-defensa. El radar detecta e inicia el acompañamiento de hasta 1000 blancos aéreos a hasta 400km. Es capaz de detectar blancos furtivos en ruido de fondo terrestre a hasta 55km y tiene capacidad contra misiles balísticos. Hace 12 rotaciones por segundo con cobertura de 360x70 grados y produce 16 haces sobrepuestos con 14 por encima del horizonte que pueden ser comprimidos en 8 para contraponer interferencia. El SMART-L hace fusión de datos a través del AAWS con el IRST Sirius, IFF, ESM, datalink y APAR, además de analisis de situación, control de armas, ejecución y monitorización de enganche y guiado de misiles.
EMPAR
El sistema European Multifunction Phased Array Radar (EMPAR) de la Alenia Marconi System fue proyectado para ser el sensor de defensa aérea primario de la fragata Horizon, originalmente proyectada para Francia, Italia y Reino Unido.
El primer estudio del EMPAR fueron iniciados en Italia en 1986 con La Alenia. Así nació el MFR-1C. En 1989, cuando el programa Famille des systèmes Surface-Air Futurs - FSAF fue iniciado, fue decidido que la variante italiana del SAAM-IT (misil Aster) iría a usar el radar MFR-1C mejorada llamado EMPAR.
EMPAR es un sensor controlado por el sistema Principal Anti-Air Missile System (PAAMS) que es el sistema de combate principal del navío. El PAAMS también incluye los misiles Aster 15 y Aster 30, el lanzador vertical Sylver A-50 y suplementado por el radar de vigilancia de largo alcance S1850M.
El EMPAR usa una antena rotativa (60 rpm) operando en la banda C (4-8 GHz) con modo primera a 5,6 GHz. La potencia es controlada por software con salida de 120W y usa compresión de pulso digital. Realiza vigilancia, acompañamiento de blanco y control de misiles.
La antena es formada por 2.160 elementos transmisores y produce un haz de cerca de 2,6 grados, apuntado en un arco de 45 grados horizontal y 60 grados vertical. El sistema puede hacer acompañamiento monopulso en 69 blancos de alta prioridad de 231 de baja prioridad, con razón de datos ajustable para cada blanco. Los 50 blancos prioritarios pueden ser acompañados con precisión suficiente para enganche inmediato, pero no simultáneamente. Se sospecha que pueda controlar hasta 24 misiles en el aire al mismo tiempo enganchando 12 blancos.

La antena del EMPAR pesa 2,56 toneladas.
El alcance de detección contra blancos de RCS de 10m2 es de 180km, o 120 para blancos con RCS de 2m2 y 50km para blancos de RCS de 0,1m2 como misiles antinavio. EMPAR tiene capacidad de borrar lóbulos laterales y mapear interferencia, usa agilidad de frecuencia y hace adaptación de forma del haz.
Una limitación significativa del sistema es la forma de la antena. Al contrario del SPY-1 y otros sistemas de cobertura de 360 grados, EMPAR usa una antena rotativa única de barrido electrónica pasiva, refrigerada al agua, inclinada la 30 grados. Fue una decisión basada en el coste, y significa que el sistema tiene capacidad reducida para cubrir ataque de saturación de varias direcciones, como el radar Top Dome de los navíos Kirov/Slava rusos. Por otro lado, el Aster necesita sólo de actualizaciones intermitentes de medio curso y usa guia terminal activa, no necesitando del EMPAR por toda la duración del enganche.

El concepto operacional requiere que el radar S1850M haga la detección de blancos la larga distancia, y lo pasa para EMPAR cuando se aproxima o constituye una gran amenaza. La S1850M o Smartello, antes T1850, mezcla tecnología del SMART-L y Martillo.

Fragata Horizon modelo italiano.
SAMPSON
Cuando la Royal Navy se retiró del programa Horizon, para hacer un navío con características propias para su destructor Type 45 clase Daring, no fue abandonado el uso del sistema PAAMS. Sin embargo el radar EMPAR fue sustituido por el radar de barrido electrónica activo Sampson de la BAe Systems.
La Royal Navy estaba insatisfecha con el desempeño del EMPAR y tenía requerimientos más existentes como cobertura de 360 grados continúa. El Sampson usa dos antenas AESA, una de apoyo para la otra, en un montaje único rotativa. La rotación es de cerca de 30 rpm con mayor razón de datos que EMPAR, pues las dos antenas equivale a girar la 60rpm.
Un radar AESA también significa formar múltiples haces independientes, con mayor capacidad multiblancos y mayor alcance contra blancos de bajo RCS, menor razón de alarmas falsas y mayor precisión de acompañamiento.
Cada antena tiene 640 TRM, cada uno conectado la cuatro antenas, formando un arreglo de 2.560 elementos emitiendo un pico de potencia de 25KW por haz, comparado con máximo de 10KW de un radar convencional. Por operar generalmente la baja potencia, el radar es refrigerado a aire para disminuir la firma IR y por ser más barato que sistemas refrigerado el agua, más leve y más confiable.
Los TRM son controlados por software con comandos por fibra óptica. El haz principal puede ser apuntado en un arco de 60 grados en azimut y sin límite de elevación.
El software también tiene capacidad de realizar modos de evaluación de incursión, estimar tamaño físico del blanco y reconocimiento de blancos no cooperativos (NCTR), protección contra misiles anti-radar, evaluación de daños de batalla y mayor potencia.
La banda S fue escogida para facilitar el trabajo de detectar blancos pequeños en la presencia de lluvia y ruido de fondo/tierra que es más difícil en frecuencia mayores. El Sampson tiene capacidad de agilidad de frecuencia de banda ancha.
El desempeño no fue publicado. Fuentes no oficiales citan la capacidad de acompañar blancos de más de 400km; acompañar 500 la 1000 blancos; enganchar 12 simultáneamente con el ASTER. El PAAMS no necesita de iluminación terminal como el SPG-62 del sistema Aegis usado para controlar los misiles Standard y el APAR hace la iluminación por sí mismo y tiene uplink integrado para el Aster 15/30.
El desempeño es tal que no es necesario la instalación del radar S1850M de las fragatas Horizon Italianas y francesas que usan EMPAR por tener capacidad de alerta anticipado con la banda S. La BAe Systems alega que la configuración del Sampson no es tan pesada cuanto la configuración de cuatro antenas fijas del SPY-1 y puede ser colocado en mástil alto.
La banda S es buena para mantener la antena en buen tamaño, lleva menos tiempo que banda I para ir en todos lugares y con menos límite de alcance, pudiendo usar técnicas de mayor resolución.
El Sampson podrá usar banda I de iluminación para RIM-7P, ESSM y SM-2 si es necesario, pero usa la misma banda del radar SPY-1 pero tiene que tener un radar dedicado para iluminación.
El Sampson puede realizar búsqueda largo alcance, medio alcance, búsqueda en el horizonte de alta velocidad, hace búsqueda de grande ángulo, blancos múltiples, acompañamiento de blancos y multicanales de tiro, guiado de medio curso y clasificación de blancos. Hace la defensa de aérea para la fragata Type 45 sin necesitar de radar banda D de largo alcance para compilar el cuadro aéreo y vectorar los cazas. El alcance y de 400km.

Aspecto inicial del Sampson. El radar tendrá dos faces para tener la razón de datos necesaria para lidiar con blancos altamente maniobrabais. Pesa menos de 5 toneladas y los sistema adicionales se quedan en seis gabinetes y consolas.
El primer sistema de radar naval de nueva generación fue el demonstrador MESAR (Multifunction Electronically Scanned Adaptive Radar) del DERA británico (actual QinetQ). El concepto propuesto para sustituir sistemas de misiles Sea Dart fue iniciado en 1977. Pasó a llamarse proyecto Sampson para ser instalado en los programas NFR-90 y Common New Generation Frigate (CNGF) que ya fueron cancelados. Otros países participantes del programa iniciaron proyectos propios como el APAR y EMPAR.
La fase 1 del MESAR tendría 156 módulos con potencia de salida máxima de 2W por TRM y fue iniciado en 1986. La fase 2 fue iniciada en 1990 y el demonstrador completo de faz única fue probado en 1993.
El MESAR 2, más completo y con 1.264 TRM, o 25-un 30% de los elementos, con 10W potencia, se quedó pronto en 1995. Fue fabricado por la Siemeens Plessey. Fueron gastados US$ 160 millones en 17 años incluyendo fondos propios de la Siemens.

El Sampson es uno de los elementos del PAAMS, más un VLS Sylver o Mk41, un radar de búsqueda de volumen en la banda D SMART-L, un sistema de comando y control y el misil Aster.

La Siemens (actual BAe System) llegó a estudiar un derivado del MESAR conocido como Spectar con 2.560 TRM y peso de 2,5 toneladas para navíos de 1000t. Consumiría 100KW contra 175KW del Sampson y con desempeño degradado. Competiría con el AWS-9/Type 996 y no necesita de radar de acompañamiento lo que lo hace barato. Girando la 60rpm puede mantener cobertura 360 grados y realizando acompañamiento y guiado de medio curso de misiles superficie-aire. La razón de actualización sería de 2 segundos contra blancos la menos de 30 grados en el horizonte a 40km y 4 segundos contra blancos altos de más de 30km. El modo de búsqueda tiene razón de datos de 4 segundos contra blancos a 200km y 2 segundos a 25km. En 1993 el MESAR mostró que puede resistir la 10-12 interferencias en los lóbulos laterales y uno en el lobo principal al mismo tiempo sin afectar funciones. Esto resultó en nuevas formas de onda que darán mayor capacidad de contra-contramedidas al Sampson.

Antena actual del Sampson. La BAe Systems recibió un contrato US$ 100 millones para suministrar 12 radares Sampson para los destructores Type 45. El Sampson es el resultado de 20 años de investigación. El Sampson podrá ser instalado en los navíos del programa. Future Escort que sustituirán las Type 23.

Antena del demostrador de tecnología MESAR.
ARABEL
Los estudios del radar ARABEL fueron iniciados en 1982 en cooperación entre el Ministerio de la Defensa Francés y la Thomson-CSF AIRSYS. Estos estudios tuvieron éxito y fueron concluidos con pruebas en Landes. Cuando el programa Famille des systèmes Surface-Air Futurs - FSAF (misiles Aster) fue iniciado en 1989, el ARABEL fue escogido para ser el radar de control de tiro del SAAM-FR y SAMP-T.
El Arabel es un radar banda X de la Thales. Es un radar rotatorio que gira la 60 rpm capaz de detectar y atacar blancos múltiples con los misiles ASTER. Puede acompañar 100 blancos y atacar hasta 10 simultáneamente. El alcance es de 70 km contra blancos con RCS de 2m². Forma parte del sistema PAAMS terrestre y naval.
El Arabel equipará a las fragatas Al Riyadh (F3000S) de Arabia Saudí equipada con dos lanzadores óctuplos Sylver con misiles Aster 15. El mástil piramidal se queda el frente del hangar y es auxiliado por un radar de búsqueda de volumen DRBV 26D Jupiter que opera en la banda D.
También equipa el NAe francés Charles De Gaulle equipado con dos lanzadores óctuplos Sylver con misiles Aster 15.

Antena del radar Arabel.

La variante naval fue instalada en el navío "Ile d'Oléron" para pruebas. El segundo fue instalado en el "Charles de Gaulle" (foto). La versión terrestre del ARABEL hace control de tiro del SAMP-T. El radar tiene un up-link para pasar mensajes para el misil cambiar de dirección al calcular la trayectoria necesaria para que su radar interno pueda detectar y cerrar en el blanco.
Mars-Passat (Sky Watch)
El radar ruso Mars-Passat fue visto en los NAe Baku en el inicio de la década de 80 por satélites de reconocimiento. El radar fue llamado de Sky Watch por la OTAN.
El radar fue introducido en servicio junto con otros radares de barrido electrónico rusos como el Zaslon del Mig-31 y el Flap Lid de los sistemas SA-10. Los soviéticos ya habian introducido radares 3D con barrido vertical electrónico equivalentes al SPS-48 americano y demostraron la capacidad de producir elementos pequeños con el Zaslon. Los cruceros Kirov y Slava entraron en servicio con la capacidad de enganchar blancos múltiples gracias al guiado TVM del radar Top Dome.
El Sky Watch fue instalado en el Baku que intercambió de nombre varias veces hasta entrar en servicio con Admiral Kusnetsov. Fue planeado la instalación de un sofisticado sistema integrado de gerencia de batalla aérea semejante al SCANFAR y el AEGIS.
El sistema tuvo problemas técnicos y el navío entró en servicio cinco años después de ser lanzado (1987). Inmediatamente fue notado que ni todos los componentes del sistema fueron instalado como las antenas. Los problemas tenían más a ver con el software que con el hardware. Por otro lado, el A-50 era el equivalente aéreo y entró en operación sin problemas. El sistema fue abandonado y el NAe Varyag tuvo la superestructura alterada y recibiría antenas convencionales para ser completado.

Antenas del Mars-Passat en el Admiral Kusnetsov.
Fuente inicial: Sistemas de Armas
Traducción: Iñaki Etchegaray
Los radares de barrido electrónico navales están disponibles desde hace más de 20 años con el AEGIS americano. Ahora están en servicio en las escoltas europeas y deberán ser patrón de los futuros navíos y otros medios. Pero lo que hace estos sistemas caros tan atractivos para la guerra naval?
La parte más crítica de un sistema de guerra antiaérea (AAW) naval es contener ataques de saturación. Estos ataques incluyen aeronaves y misiles antinavio venido de varías direcciones coordinadamente, para vencer las defensas. El enganche de cada blanco por los sistema AAW requiere acompañamiento preciso para que el sistema de control de tiro sea suplido con informaciones adecuadas.
Las antenas convencionales de radar hacen este acompañamiento relacionando los ecos sucesivos de cada blanco. Esta información es hecha en el modo TWS "track-while-scan" y es hecha con cuántos blancos el ordenador del sistema permitir. Cuanto mayor la razón de barrido del radar, mayor la cantidad de información del blanco. La razón de datos es proporcional la rotación de la antena.
La calidad de los datos necesaria pasa a ser alta y necesitando de una rotación muy alta. Blancos en alta velocidad y alta agilidad pasan a ser prácticamente imposibles de enganche. Para blancos la larga distancia, la energía reflejada debe ser grande y para esto la rotación debe ser más lenta. Aumentando la rotación el alcance disminuye. No es posible compatibilizar largo alcance y buena capacidad de control de tiro con antena giratoria.
La respuesta es usar antenas separadas para cada función. Los radares de vigilancia hacen detección de largo alcance y pasa los datos para el radar de acompañamiento para rastreo de alta calidad y operación de control de tiro (iluminación de blanco). Esta solución es adecuada para escenario con blanco único o pocos blancos e inadecuado para escenario de saturación. La capacidad multitargets es igual al número de radares de iluminación y generalmente instalados en pequeño numero (2 por escolta leve y 4 para escoltas pesados).
Un nuevo sistema para operar en un escenario de saturación obviamente no podría ser giratorio. Para tenerse un gran razón de datos el haz de radar debe cambiar de blancos casi instantáneamente lo que es imposible para antena mecánica. Esto sería posible se la antena fuera apuntada electrónicamente con varios transmisores independientes.
El comienzo físico de los radares de barrido electrónico es relativamente simple. Primero tenemos una antena plana compuesta de transmisores regularmente espaciados (phased array o arreglo en fase), todos emitiendo la misma señal. El patrón de cada señal es sinusoidal con amplitud máxima y única. La interferencia entre ellos puede ser grande y esto es intencional y aceptado.
Con la interferencia constructiva la energía electromagnética es máxima cuando están en fase. La región donde forma esta fase puede ser usada para formar un plano dimensional virtual. El vector del lóbulo principal del pulso transmitido es siempre perpendicular al plan del campo electromagnético generado por el transmisor.
Cuando todos los transmisores están en la misma fase (como en la antena mecánica), el plan del campo electromagnético es paralelo a lo de la antena, y el lóbulo principal será apuntado directo para frente. Cambiando la orden de transmisión, o alterando la fase, con un pulso inmediatamente el frente y otros más para atrás, el plano electromagnético gira y el lobulo principal es apuntado hacia otra dirección. Por ser hecho electrónicamente, el giro es prácticamente instantáneo.
Princípio de funcionamento de los radares de arreglo en fase.
Las antenas de radar mecánicas usan este principio con varías guías de ondas, cada una como elemento transmisor independiente. Cambiando la fase es posible alterar la dirección vertical para obtener datos de altitud, pero el barrido horizontal depende de la rotación de la antena. Un ejemplo es el APY-1/3 de lo Y-3 Sentry y la mayoría de los radares 3D de la US Navy como el SPS-48 . Esta medida es un paso provisional debido al alto coste y al nivel inmaduro de tecnología. Con la disminución de los costes pasó a ser más viable el uso de múltiples elementos para barrido horizontal y vertical.
La capacidad de obtener una gran razón de datos de un gran número de blancos la gran distancia no es la única ventaja de las antenas de barrido electrónica. Debido a cambio del haz casi instantáneo, un único radar puede hacer varios funciones simultáneamente. Por ejemplo, vigilancia de inmediatamente alcance, acompañamiento de blancos sospechosos con baja razón de acompañamiento, acompañamiento de blancos enemigos con alta razón de datos e iluminación de blancos. Estas funciones necesitarían de una cooperación sin fallo de varios radares de barrido mecánica. El resultado puede ser la disminución del número de sensores.
Durante la detección de un blanco en potencia, un radar de barrido mecánico espera algunos retornos para correlacionar, por lo menos dos, y extraer el curso y velocidad, para reiniciar un nuevo proceso de acompañamiento.
Dependiendo de la tasa de actualización, es gasto en tiempo valioso en la detección de blancos enemigos. Si el blanco consigue negar algunos barridos durante el acompañamiento, como bajar en el horizonte o la aparición de obstáculos, el acompañamiento tendrá que ser reiniciado con nuevos atrasos.
Algunos radares tiene memoria de acompañamiento para disminuir este problemas, y se pierden el acompañamiento, ellos mantiene la búsqueda en la dirección esperado para intentar readquirir el blanco, pero sólo funciona por poco tiempo. Realizando enmascaramiento del terreno, interferencia o "beaming", los blancos enemigos pasan a tener buena oportunidad de que se aproximen sin que sean acompañados y enganchados.
Los radares de barrido electrónico pueden iniciar el acompañamiento inmediatamente con la detección del blanco reposicionando el haz de radar inmediatamente en vez de esperar una barrida. A pesar de que también pudieran ser entorpecidos por las mismas técnicas de quiebra de acompañamiento, ellos pueden contener más fácilmente. Por ejemplo, para el haz principal puede ser instruído para aumentar su tiempo barriendo el punto donde la amenaza fue detectada, disminuyendo tiempo de barrido de otros blanco menos amenazadores, para el caso de reaparecezca y ser rápidamente detectado.
Los radares convencionales crean lóbulos secundarios además del lobulo principal. Estos lobulos son altamente indeseables por que sean útiles para el reconocimiento electrónico enemigo y fuente de vulnerabilidad de interferencia. Los radares de barrido electrónico producen pequeños lóbulos laterales y son menos vulnerables de explorar.
Las antenas convencionales son vulnerables la vibración y difíciles de mantener y operar. Los radares de barrido electrónico tiene pocas partes moviles y no vibran. Son más fáciles de estabilizar en relación al movimiento del navío. Las antenas convencionales tiene mecanismos complicados de estabilización que son difíciles de mantener.
Los radares convencionales tiene varias fuentes de fallo. Si el servomotor de la antena falla el radar se para. Si el estabilizador fallo, la unidad de acompañamiento se degrada. Si la antena tiene fallos en la forma deja de tener utilidad. Los radares de barrido electrónico fallan, pero tiene construcción modular y pueden fallar en algunos módulos sin problemas, aún por fragmentos de un misil anti-radar, pero continúa con capacidad reducida.
Las antenas de barrido mecánico son proyectadas con un conjunto de requerimientos operacionales que direccionan especificaciones técnicas. El radar irá a transmitir un pulso con cierta energía y frecuencia, un cierto PRF y con un haz de cierto rango. El tamaño y forma de la antena depende de este requerimientos y girará a cierta velocidad. El hardware tendrá que ser alterado si el adversario usr una nueva técnica de interferencia o lo retorno de la costa o mar fuere mayor que el esperado, o la razón de datos fuere mayor que el necesario, o si el uso operacional mostrar que estas especificaciones son inadecuadas.
Los radares de barrido electrónico tiene limitaciones físicas como potencia de transmisión, cobertura de barrido pero son muy flexibles en los límites operacionales. Sus características técnicas son direccionadas por software y el hardware puede ser modificado para ajustarse al ambiente. Un sistema controlado por software también aumenta la flexibilidad táctica de su empleo operacional. El haz puede ser alterado en el campo para adaptarse la situación táctica en vez de considerar los datos de inteligencia.
Las antenas formadas con varios módulos transmisores en un único receptor son llamados Passive Electronic-scan Arrays. El próximo paso son módulos transmisiones/receptores (TRM) y llamados Active Electronic-scan Arrays (AESA). Los radares AESA necesitan de mucho más integración de electrónicos y son más caros de desarrollar.
Lo beneficio claramente justifica los costes y complejidad. En vez de formar un único haz y apuntarlo, la presencia de varios TRM permite formar varios haces independientes y cada uno con una tarea. En vez de tener un único haz con tareas divididas en el tiempo como vigilancia, acompañamiento, control de tiro etc, y saltar de un blanco para otro, es posible considerar un haz constante para cada blanco y otras tareas siendo realizadas por otros haces. Esta capacidad multifuncional abre otra capacidades como transmitir dos señales o más complemente diferentes y usar como interferidor potente. Un radar AESA usan menos potencia y cada TRM tiene un pequeño pulso electromagnético con los haces siendo formados con la intersección de los pulsos.
Otras ventajas ahora más entendidas son la redundancia, resiste más a daños de batalla, tiene menos piezas de reposición, bajo coste de los TRM y coste ciclo de vida. Los radares convencionales tiene limitación de potencia, y el TRM no y pueden se múltiples. El bajo voltaje también hace más bajo para mantener. Los costes llegan la mitad de un radar convencional con menos tripulación y menos tamaño para economía.
Capacidades de un radar naval multifuncional con tecnologia de arreglo en fase.
El principio de los radares de arreglo en fase (phased arrays) está en uso desde la Segunda Guerra Mundial. Los mayores avances en la teoría y tecnología fueron conseguidos en las décadas de 50 y 60. El uso operacional ocurrió en la década de 60 y 70. Esto ocurrió debido a tecnología de controladores de fase computación para control.
Aunque la mayoría de los radares de arreglo en fase tenga la apariencia del SPY-1, no todos son así. Otros ejemplos son los radares de alerta de misiles americanos con tamaño de edificio de 10 pisos, o radares OTH como el Jindalle australiano y RIAS francés este último con antena circular omnidirecional.
Las antenas de arreglo en fase también tiene otras aplicaciones como equipar cazas, radares de búsqueda en tierra, comunicaciones por satélite e interferencia electrónica. En 2003 la QinetQ británica inició la prueba de radares de arreglo en fase en misiles para mejorar la capacidad de contra contramedidas electrónicas (ECCM).
AEGIS
Desde la Segunda Guerra Mundial la US Navy viene desarrollando tácticas y sistemas para protegerse de ataques aéreos. Después de la Segunda Guerra Mundial varias generaciones de misiles anti-navío aparecieron para unirse a la amenaza aérea. El primer navío hundido por uno de estos misiles fue el destructor israelí Eilat hundido por misiles Styx rusos disparados de lanchas lanza-misiles egipcias en octubre de 1967.
La amenaza fue confirmada en abril de 1988 cuando dos navíos iraníes disparan contra navíos americanos en el Golfo Pérsico. En el cambio de misiles una fragata iraní y una corbeta fueron destruidas por misiles Harpoon americanos.
La estrategia para defenderse de estas amenazas, que pueden atacar desde larga distancias, a partir de mar, tierra, aire y submarinos, coordinados con otros medios, y alcanzando simultáneamente el blanco, fueron las tácticas de defensas en capa. Los cañones fueron sustituidos por la primera generación de misiles superficia-aire.
Operaciones en el litoral requiere la capacidad de defenderse de 5-10 misiles con alerta de 30 segundos, junto con amenaza aérea y de superficie, interferencia y ruido de fondo. Los blancos pueden estar volando bajo, realizando maniobras "pop-up", misiles balísticos y blanco furtivos.
SPG-59/Typhon
La primera tentativa de hacer un radar de barrido electrónico fue en 1958 con la US Navy desarrollando un sistema de guerra antiaérea (AAW) llamado Typhon que daría capacidad multi-blancos para los sistemas de misiles Terrier Tartar y Talos. Estos sistemas no fueron proyectados para contraponer la amenaza de bombarderos y misiles de la aviación naval soviética en ataque de saturación.
La solución de la época era un modo de guia de tipo "track-vía-missile/" (TVM), usado posteriormente en el Patriot terrestre, donde la señal de radar era recibido por el misil, pero repasado y procesado en el navío que tenía mucha más capacidad de procesamiento. La estructura del sistema necesitaba de un radar capaz de desempeñar varías tareas como control de tiro e iluminación terminal de varios contactos simultáneamente. El corazón del sistema sería el radar de barrido electrónico SPG-59 junto con un misil capaz de interceptar blancos a 200km.
Luego en el inicio de las investigaciones las dificultades comenzaron a aparecer. No había tecnología disponible y los módulos TR eran muy caros. La búsqueda de módulos TR era baja para satisfacer la producción masiva y los módulos eran poco confiables. El coste de una única antena era muy caro y consumiría mucha energía sólo siendo viable en navíos nucleares. El programa fue cancelado en diciembre de 1963.
Los radares SPG-32 y SPG-33 fueron lo próximas tentativas de la USN de hacer un radar de barrido electrónico con los requerimientos relajados. La iluminación de blancos para misiles con guiado de radar semi-activa pasó a tener directores dedicados y continuó a ser usado un radar de vigilancia convencional mientras el SPG-59/Typhon sería el único radar a bordo.
Los requerimientos de acompañamiento preciso de varios blancos continuaba y eran complicados con la capacidad de contra-contramedidas de las escoltas de las aeronaves soviéticas. Los costes de los electrónicos disminuyó en una década pero aún eran caros. Los transistores aún no aparecieron en producción masiva y continuarían a usar válvulas. Aún así los radares fueron instalados en el Nae Enterprise y en el crucero Long Beach.
Estos sistema fueron instalados en navíos nucleares y eran bien pesados. Como el SPG-59, el sistema SCANFAR consumía muchísima energía y era una de las flaquezas de los sistema. La antena era muy pequeña y en un navío menor crearía problemas de estabilidad, o sería instalado próximo a la línea d'agua, disminuyendo su eficiencia.
En el Enterprise el radar daría una visión aérea clara actualizada instantáneamente. Durante el desarrollo fue percibido que cada sistema de vigilancia de área y acompañamiento de blanco necesitaría de características de fajo diferente. Esto resultó en el uso de dos antenas de forma diferente: El SPG-32 era rectangular para vigilancia aérea y el SPG-33 tenía un conjunto de cuadrados posicionado verticalmente para acompañamiento de blancos. Eran cuatro antenas en par cubriendo 90 grados cada.
El sistema mostró ser insatisfactorio durante su carrera. Aún cuando funcionaba, el sistema era incapaz de dar los beneficios prácticos esperados. Esto se debía más a los sub-sistemas analógicos o analógicos/digitales usados. Las dificultades de mantenimiento también era consideradas superiores a los beneficios operacionales. Las antenas del Enterprise y Long Beach fueron retiradas en el fin de los años70 e inicio de los años 80 y sustituidas por sistemas convencionales.
El crucero nuclear CGN-9 Long Beach fue equipado con el radar de barrido electrónico SPS-32 Scanfar, dos lanzadores dobles Terrier con 120 misiles y un lanzador doble Talos con 52 misiles. Fue propuesto para convertirse en AEGIS entre 1978 y 1981. El proyecto fue cancelado debido a edad del navío. En 1979 el Talos y SPG-59 fueron retirados. En 1983 el sistema Terrier fue sustituido por el Standard SM-1 y dos Phalanx.
En 1958 fue iniciado el proyecto de un nuevo misil para sustituir el Talos, Terrier y Tartar que mostraron ser fácilmente saturado por ataque masivo. La razón de tiro era limitada a lo numero de radares iluminación. En 1958 escogido la guiado TVM con la señal de radar recibido por el misil, repasado para el navío donde era procesado que tendrían muy más capacidad de computación y usaría el radar SPG-59 de barrido electrónica. El misil fue llamado originalmente de Super Talos/Super Tartar, y para evitar confusión fue llamado de Typhon. El RIM-50A Typhoon LR pesando 9.070kg y alcance de 320km sustituiría el Talos y RIM-55A Typhon MR con alcance de 46km sustituiría al Terrier y Tartar. Los misiles tendrían radar activo y propulsión ramjet. Fueron considerados caros y complejos y cancelados en 1963 sin pasar de la fase de proyecto. A US Navy inició el proyecto de la familia Standard. La foto es del Typhoon LR.
Sistemas de Armas AEGIS MK-7 - SPY-1
En el fin de los años 60, fue percibido que el tiempo de reacción, potencia y disponibilidad de los misiles de la familia Terrier ya no era suficiente. Así surgió el requerimiento del Advanced Surface Missile System (ASMS), y renombrado AEGIS en diciembre de 1969.
El AEGIS fue proyectado como un sistema de armas completo, de la detección hasta la destrucción del blanco para defender a cuadra de misiles anti-navíos, principalmente como una respuesta a la táctica soviética "carrier killer" de saturación con misiles anti-navío.
El sistema de armas AEGIS es un sistema de armas superficie-aire integrado. Fue proyectado para defender la flota contra cualquier amenaza aérea. El AEGIS es responsable por la defensa de aérea para grupo batalla y compila el cuadro aéreo para cazas que se concentran en la batalla aérea externa. Con modernizaciones posteriores el AEGIS pasó a ser el sistema de defensa anti-misiles balísticos primario de la US Navy.
Los componentes principales del sistema: misil y sistema de lanzamiento (Versiones del Standard y el lanzador MK26), Command and Decision System, Weapons Control System, antena de barrido (la famosa antena plana AN/SPY-1A) y sistema computacional asociado y el sistema de comando y control.
El AEGIS fue desarrollado a partir del sistema Typhon para ser instalado en grandes fragatas, aprovechando tecnologías, como los radares de barrido electrónico SPG-59 junto con el programa Talos y Tartar.
En 1968 fue suscrito un contrato con Boeing/General Dynamics y RCA para desarrollo y pruebas del sistema.
La RCA Electronics, que pasó para la General Electric y ahora parte de la Lockheed Martin, recibió un contrato inicial para desarrollar el AEGIS y su componente más importante, el radar de barrido electrónico SPY-1, en 1969. El radar iría a cooperar con el nuevo misil superficie-aire RIM-66 Standard que estaba entrando en servicio masivo.
Las lecciones del Typhon y SPS-32 SCANFAR serviría para que los investigadores piensen en el mundo real con un sistema útil. Desde lo inicio fue pensado en integrar todos los sistema digitales de control y manipulación del haz principal y del procesamiento de la señal recibida. Esto aseguraría que el sistema funcionaría como anunciado. La antena también sería muy leve y consumía menos energía. Fue hecha una separación clara entre hardware y software para facilitar las modernizaciones de largo plazo. Fue dado énfasis el mantenimiento y confianza, aún sacrificando el desempeño.
El sistema inicial fue instalado por primera vez en el navío prueba AVM-1 Norton Sound en 1974. El navío también recibió módulos de todo el sistema como el CIC y radares de iluminación de misiles. En 1975 lo corrió la primera prueba del sistema con un misil Talos modificado siendo abatido por un misil Standard .
El enganche de blancos múltiples fue demostrado en 1977. El navío disparó dos misiles Standard RIM-66C contra dos drones BQM-34. Los misiles no fueron iluminados todo el tiempo como en los SAM navales anteriores. Fueron disparados inicialmente en dirección a un punto en su y guiados hasta allá con su INS. Después recibieron actualización de medio curso de la posición del blanco del radar SPY-1. Los blancos fueron iluminados por el SPG-62 dividiendo el tiempo entre los de los blancos. Los dos blancos fueron derribados.
Entre 1974 y 1980 fueron realizadas pruebas y mejorías en los sistema. La adopción de nuevos ordenadores aumentó en mucho el desempeño y confianza. La prontitud nunca era menor que un 96%.
Desde lo inicio de las pruebas había dudas sobre como el sistema sería usado. Una propuesta era de un destructor para uso masivo y con bajo coste y capacidad limitada. Esto causaría divergencia entre la capacidad prometida y el poder aparentemente limitado del nuevo navío.
Fue estudiada la instalación del AEGIS en los cruceros nucleares de la Clase Virginia (CGN-38), pero los plazos de entrega y otras consideraciones hicieron impracticable. Después fue estudiado un crucero de ataque nuclear (CSGN) para el inicio de la década de 70. Los dieciséis CSGN serían usados a los pares para escoltar cada uno de los ocho NAe nucleares americanos. Esto significa que los AEGIS serían navíos poco numerosos y la tecnología no sería usada como querían.
Con la cancelación del CSGN, finalmente fue adoptado una versión mayor del destructor Spruance con AEGIS y dos lanzadores MK-26, después sustituidos por el VLS Mk-41 de lanzamiento vertical. Estos navíos fueron clasificados como cruceros, llamados de clase Ticonderoga, y entraron en operación en 1983.
El AEGIS es un sistema de sistemas. El corazón del AEGIS es el radar AN/SPY-1 de barrido electrónico que hace búsqueda, detección, acompañamiento y control y guiado de misiles simultáneamente.
Los otros elementos son el Mk 99 fire control directors (radar SPG-62), Command and Decision System, Fire Control System, Weapons Control System, Operational Readiness and Test System, Aegis Combat Trainer System, y Aegis Display System.
El SPY-1 es capaz de detectar y acompañar centenares de blancos de más de 350km, los clasificas, pudiendo enganchar varios al mismo tiempo, más de 20, separadamente, con los misiles SM-2 Standard. El tiempo de reacción medio en segundos supera en mucho los radares giratorios. El radar también es capaz de detectar blancos de superficie y balísticos.
El radar SPY-1 no debe ser descrito sin considerar el contexto de todo el sistema que apoyo. El radar opera en la banda S (3,1-3,5 GHz) y usa cuatro antenas de barrido electrónico pasiva tiene forma octogonal plana midiendo 3,65x3,65m cada. El fajo tiene cerca de 1,7x1,7 grados. La versión inicial SPY-1A tenía 4.480 elementos agrupados en 32 grupos de transmisores.
Los elementos transmisores tienen 132W de pico de potencia. La potencia media es de 58KW y la potencia máxima llega la 4-6 MW. Un radar de búsqueda rotatorio genera cerca de 1 MW en la misma banda.
En la foto, de un crucero Ticonderoga, es posible ver la antena de la proa. Existe otra tres en las laterales y una otra por encima del hangar del helicóptero, en la superestrutura de red. Con esa disposición, el navío posee una cobertura de 360º continua. Cada antena cubre 90 grados. El alcance es de 300 km para búsqueda aérea y cerca de 80km para búsqueda en el horizonte. El coste total del programa AEGIS fue de US$ 42,7 mil millones de dolares.
El centro del sistema Mk7 Mod3 era compuesto de 16 supercomputadores UYK-7, un servidor UYK-19 y 11 minicomputadores UYK-20, todos de la Unisys. Los módulos de computación eran agrupados físicamente juntos para formar una unidad procesadora única con interfaz con pantalla a color Hughes AN/UYA-4 y cuatro otros menores PT-525. El sistema fue limitado a mostrar 128 blancos para evitar saturación y puede ser aumentado en combate. Los últimos modelo usan ordenadores comerciales con más de mil veces la capacidad de procesamiento original.
En el modo automático, los ordenadores tiene total autoridad de los sensores del navío y armas y también de varios navíos próximos subordinados al control del navío vía NTDS u otros sistemas de datalink compatible. La estructura del sistema es compatible con los protocolos NTDS y cambio datos veía Link 11 y Link 16.
La principal diferencia con la próxima versión SPY-1B era la adición de un modo de alta elevación para acompañar misiles la gran altitud como lo Las-4 y Las-6. Nuevos modelos más compactos disminuirían el peso total (cada uno pasó de 5,44kg para 3,56kg por módulo TR). Esto también resultó en la disminución del número de elementos en el subgrupos y la formación de fajos más angostos. Nuevos ordenadores UYK-43/44 fueron instalados con mayor capacidad de procesamiento. Aún con la reducción del consumo de energía los Ticonderoga perdían cerca de 2.000 millas de alcance cuando el SPY-1 transmitía continuamente.
En 1980 fue percibido que navíos menores con capacidad AEGIS ya era posible con la tecnología disponible y manteniendo la misma capacidad. Un navío menor tendría casco con avances para mantener las calidades marineras y disminuir la firma IR y RCS. Así surgió la clase DDG-51 con el primer navío comisionado en 1991.
La nueva clase de destructores DDG-51 Arleigh Burke tiene un desplazamiento inferior comparado con los DDG-47 Ticonderoga y recibieron el modelo SPY-1D. Cada transmisor pesaba 1,91 kg. El SPY-1D también fue instalado en los destructores Kongo japoneses y en las fragatas F-100 españolas.
El SPY-1D(V) fue modernizado para operar en el litoral con mejor capacidad contra misiles crucero furtivos volando bajo y ruido de fondo pesado en la presencia de interferencia electrónica pesada. El SPY-1D(V) fue instalado en los DDG-51 Flight IIA iniciando en 1998.
Las versiones más reciente SPY-1F y SPY-1K son más ligeras y con área menor y proyectadas hacia exportación. El SPY-1F fue seleccionado para las cinco fragatas F-310 noruegas. El SPY-1K es aún más compacto y debe ser usado en fragatas y corbetas. Las versiones menores no tiene capacidad anti-misil balístico
Fragata española F-100 Alvaro de Bazan equipada con AEGIS
A pesar de las incontables ventajas el SPY-1 tenía algunos puntos débiles. El AEGIS fue proyectado para operar en el mar abierto y en el litoral, sin embargo, fue configurado para mirar por encima del terreno para evitar blancos falsos en exceso. Esta configuración puede aumentar la susceptibilidad contra blancos volando bajo. Otro problema es que después de disparar una salva, el blanco no será reenganchado hasta ser confirmado su destrucción. Como el radar es instalado relativamente bajo y no en un mástil, el horizonte radar es menor. Los DDG-51 tampoco tiene un radar de búsqueda secundario AN/SPS-49 como los Ticonderoga.
El AEGIS ya fue probado en combate, pero sólo para disparar misiles Tomahawk. En 1980 el crucero USS Vincennes (CG-49) disparó un misil Standard contra un Airbus pensando que era un F-14 iraní. En otra ocasión un otro Ticonderoga abrió fuego contra nubes pesadas pensando ser un ataque aéreo.
Las versiones bases del sistema AEGIS son:
SPY-3
La US Navy planea instalar un radar multifuncional (MFR) en sus futuros navíos basado en tecnología AESA.
El programa de desarrollo de tecnología Multi-Mission Receive Shared Aperture (MMRSA) para el destructor DD(X) fue iniciado en 2001 para desarrollar un radar de la banda banda H/I/J (6-18 GHz).
Eran dos configuraciones posibles en la forma del AN/SPY-2 operando en la banda Y/F de la Lockheed Martin. Costaría US$ 125 millones cada o US$ 100 millones sin capacidad contra misiles balísticos.
El otro programa sería un radar AESA de la banda I/J de medio alcance de la Raytheon apoyado por un radar de búsqueda de volumen tridimensional (3D) Volumen Search Radar (VSR). El VSR tendría coste de desarrollo de US$100-150 millones con antena de 3,6m de diámetro con tecnología de arreglo en fase equipada con 240 módulos de 140W cada y 730 receptores. El alcance de búsqueda sería de 400km. Costaría US$ 10 millones cada.
El MFR costaría US$ 200-300 millones para desarrollar y sería optimizado para defensa contra misiles de crucero antinavio volando muy bajo. Tendría 24 mil TRM y variantes menores para NAes y navíos anfibios. El coste unitario sería de US$ 30 millones cada o menos para variante de 4 mil elementos. Sería capaz de detectar periscópio, misiles, iluminar blancos, y realizar búsqueda y acompañamiento de blancos.
La US Navy estudió la propuesta del APAR Mk 2 que equiparía el DD(X) y la fragata alemana F-125.
La Raytheon fue escogida e irá a equipar el CVN-77 y DD(X). La entrada en operación está prevista para 2008 con DD(X). El radar dirigirá los misiles ESSM y SM-2/3 Standard, además de proyectos futuros. Si llamará AN/SPY-3 Multi-Function Radar (MFR) operando en la banda X.
El MFR será suplantada por un radar de búsqueda de volumen que substiturá los SPS-48Y, SPS-49, SPN-43, SPS-67, Mk23 TAS y Mk-95 pudiendo ser instalado en navíos antiguos
En junio de 2003 la Raytheon Integrated Defense Systems entregó la primera antena SPY-3 para pruebas en la US Navy.
DD(X)
CVN-78
APAR
El Active Phased Array Radar (APAR) es el radar del sistema de Guerra Antiaérea (AAW) del programa Tripartite Frigate Cooperation (TFC-AAW). El sistema incluye también al radar SMART-L de vigilancia aérea y lanzadores verticales Mk-41 VLS para misiles SM-2 Standard y ESSM.
El APAR será el primero de una nueva generación de radares marítimos. Usa tecnología del programa de demostración EXPAR (Experimental X-band/ Phased Array Radar) de la TNO-HIEL/Signaal de 1989.
El programa fue iniciado en 1993 y adoptado en 1994 como parte del sistema AAWS Anti-Air Warfare System (AAWS) para las fragatas F-124 alemanas, Die Zeven Provincien (LCF - Luchtverdedigings ein Commando Fregatten) holandesa y la F-100 española. España salió del programa y Canadá entró posteriormente.
El sistema completo TFC-AAW fue desarrollado por un consorcio formado por la Thales holandesa (ex Signaal), Northen Telecom, EADS, Euroatlas, Comdev, Stork Canada y varias subsidiarías de la Lockheed Martin y Thales.
El contrato inicial de US$125 millones con la Hollandse Signaalapparaten fue hecho en 1995 para desarrollar el radar. La Signaal es líder del proyecto y responsable por la ingeniería del sistema, gerencia del programa, unidades de procesamiento, proyecto de la antena y fabricación. La DASA fabrica las unidad procesamiento, generador de ondas. La Epro, Sican y Euroatlas alemanas hacen el suministrador de energía. Canadá participa con Northern Telecom que produce los TRM.
Fueron encomendados siete radares APAR para Holanda (4) y Alemania (3) para fragatas clase De Zeven Provincien LCF y F-124 Sachsen. Los siete radares encomendados costaron US$200 millones. La Tortehn Telecom recibió un contrato de US 91 millones para fabricar los TRM.
La influencia americana es obvia debido a configuración de cuatro antenas fijas. Pero tambien las diferencias son varías. El APAR usa un radar AESA al contrario del barrido pasivo. El AEGIS necesita de iluminación SARH para guiado terminal mientras el APAR guía el misil del lanzamiento hasta el impacto. Esto significa una operación en frecuencia más alta para dar precisión final.
El APAR opera en la banda I (8-10 GHz). La banda I fue escogido para detección en el horizonte en vez de alcance y es compatible con los misiles ESSM y SM-2. El alcance nominal es menor pero con mayor precisión de acompañamiento. La resolución de largo alcance es de menos de 1 metro y puede usar técnicas de reconocimiento de blancos no cooperativos (NCTR). El radar mapea el litoral para relacionar retornos y evitar señales espurias.
Cada antena tiene 3.424 elementos, controladas en cuatro antenas de 856 elementos en 64 columnas. Cada antena hace barrido de 70 grados de elevación y 120 grados en azimut cubriendo 360 grados y con sobreposiçión entre ellas. Cada antena tiene su propio procesador de señales, unidad de procesamiento de datos y dos usan el mismo sistemas de gerencia y acompañamiento.
El sistema puede formar más de 1.000 haces independientes para varias funciones simultáneamente o sea produce más de 500 haces por segundo. Los modos originales incluyen búsqueda en el horizonte, acompañamiento de blancos múltiples, apoyo de guiado de misiles (SARH), apoyo de fuego naval, búsqueda de punteria, búsqueda de volumen de back-up y búsqueda y acompañamiento de superficie.
El desempeño publicado cita alcance contra blancos volando bajo de 75 km, acompaña hasta 250 blancos a 150 km para acompañamiento monopulso de 250 blancos y búsqueda de superficie de 32 km. Hasta 16 blancos pueden ser enganchados simultáneamente con 32 misiles en el aire del tipo RIM-7P, SM-2 MR Block IIIA/B, SM-2 ER Block IVA o ESSM. En la iluminación final, el radar usa modo de iluminación de onda continúa intermitente (ICW).
Cada columna del radar tiene ocho TRM.
Arquitectura del APAR.
El radar pesa 20 toneladas siendo mitad del mástil. Cada antena pesa 2 toneladas. Los TRM tiene 5W de potencia pudiendo producir hasta 85KW por faz. El radar puede perder un 5% sin degradar el desempeño. La antena es protegida con tejido Teflon bajo presión y refrigerado a liquido por ser más eficiente.
España salió del proyecto y escogió el radar SPY-1D en 1995, para equipar sus fragatas F-100.
Canada debe equipar cuatro fragatas Halifax para la modernización de media vída después de 2005. Los estudios iniciales indicaron que necesitará de lastre con ganancia de 105 toneladas o un "plug" de 10 metros para acomodar el nuevo sistema. Durante la construcción de la clase estaba previsto que el segundo lote debería ser aumentado pero fue abandonado en el proyecto. Esta extensión ahora volvió a ser pensada.
El APAR fue propuesto para el programa TF2000 turco, KDX-3 de Corea del Sur. La fase 4 del Warfighting Improvement Programme (WIP) o proyecto SEA 1348 australiano para modernizar las fragatas ANZAC prevé un radar de barrido electrónico de cuatro faces para dar capacidad antimisil alrededor de 2004
La US Navy estudia un radar multifuncional desde 1996 con el proyecto Akcita para radar banda I entre otros y el APAR es una de las propuestas.
El APAR puede ser instalado en navíos de hasta 1.500 toneladas con cuidados para peso en las partes altas. Una versión menor en 2005-2010 fue planeado. Existen estudios de una antena de tres faces con mitad del tamaño capacidad de controlar misiles y cañones o una antena rotativa sin capacidad de iluminar blanco.
El APAR será auxiliado por el SMART-L para búsqueda de volumen.
Fragata alemana F-124.
Fragata holandesa De Zeven Provincien.
El SEAPAR (Self-defense ESSM Active Phased-Array Radar) operando en la banda I/J fue propuesto para control de tiro del misil ESSM por la Raytheon y Thales a partir de 2006. El SEAPAR usaría tecnología del SPY-3 y APAR por esto sería llamado "baby APAR" o "baby SPY-3". El peso sería de 25-un 30% del APAR. Tendrá 3 o 4 faces y debe ser capaz de enganchar 4 blancos simultáneamente con 8 misiles en el aire a través de guiado por onda continua intermitente y datalink. Hace búsqueda en el horizonte a 30 km y búsqueda de volumen limitada la gran elevación.
El SEAPAR fue propuesto para navíos menores que fragatas.
El ESSM está previsto para ser instalado en más de 250 navíos. El ESSM es una modernización cinemática del RIM-7P de la OTAN en servicio desde 1991. El ESSM es capaz de maniobrar la 50g y tiene alcance de 30km y vectoriamento de empuje (TVC).
El SMART-L, parte del sistema AAWS, es un radar 3D de búsqueda de volumen que opera en la banda D volumen búsqueda, alerta anticipado, control de cazas, defensa de área y auto-defensa. El radar detecta e inicia el acompañamiento de hasta 1000 blancos aéreos a hasta 400km. Es capaz de detectar blancos furtivos en ruido de fondo terrestre a hasta 55km y tiene capacidad contra misiles balísticos. Hace 12 rotaciones por segundo con cobertura de 360x70 grados y produce 16 haces sobrepuestos con 14 por encima del horizonte que pueden ser comprimidos en 8 para contraponer interferencia. El SMART-L hace fusión de datos a través del AAWS con el IRST Sirius, IFF, ESM, datalink y APAR, además de analisis de situación, control de armas, ejecución y monitorización de enganche y guiado de misiles.
EMPAR
El sistema European Multifunction Phased Array Radar (EMPAR) de la Alenia Marconi System fue proyectado para ser el sensor de defensa aérea primario de la fragata Horizon, originalmente proyectada para Francia, Italia y Reino Unido.
El primer estudio del EMPAR fueron iniciados en Italia en 1986 con La Alenia. Así nació el MFR-1C. En 1989, cuando el programa Famille des systèmes Surface-Air Futurs - FSAF fue iniciado, fue decidido que la variante italiana del SAAM-IT (misil Aster) iría a usar el radar MFR-1C mejorada llamado EMPAR.
EMPAR es un sensor controlado por el sistema Principal Anti-Air Missile System (PAAMS) que es el sistema de combate principal del navío. El PAAMS también incluye los misiles Aster 15 y Aster 30, el lanzador vertical Sylver A-50 y suplementado por el radar de vigilancia de largo alcance S1850M.
El EMPAR usa una antena rotativa (60 rpm) operando en la banda C (4-8 GHz) con modo primera a 5,6 GHz. La potencia es controlada por software con salida de 120W y usa compresión de pulso digital. Realiza vigilancia, acompañamiento de blanco y control de misiles.
La antena es formada por 2.160 elementos transmisores y produce un haz de cerca de 2,6 grados, apuntado en un arco de 45 grados horizontal y 60 grados vertical. El sistema puede hacer acompañamiento monopulso en 69 blancos de alta prioridad de 231 de baja prioridad, con razón de datos ajustable para cada blanco. Los 50 blancos prioritarios pueden ser acompañados con precisión suficiente para enganche inmediato, pero no simultáneamente. Se sospecha que pueda controlar hasta 24 misiles en el aire al mismo tiempo enganchando 12 blancos.
La antena del EMPAR pesa 2,56 toneladas.
El alcance de detección contra blancos de RCS de 10m2 es de 180km, o 120 para blancos con RCS de 2m2 y 50km para blancos de RCS de 0,1m2 como misiles antinavio. EMPAR tiene capacidad de borrar lóbulos laterales y mapear interferencia, usa agilidad de frecuencia y hace adaptación de forma del haz.
Una limitación significativa del sistema es la forma de la antena. Al contrario del SPY-1 y otros sistemas de cobertura de 360 grados, EMPAR usa una antena rotativa única de barrido electrónica pasiva, refrigerada al agua, inclinada la 30 grados. Fue una decisión basada en el coste, y significa que el sistema tiene capacidad reducida para cubrir ataque de saturación de varias direcciones, como el radar Top Dome de los navíos Kirov/Slava rusos. Por otro lado, el Aster necesita sólo de actualizaciones intermitentes de medio curso y usa guia terminal activa, no necesitando del EMPAR por toda la duración del enganche.
El concepto operacional requiere que el radar S1850M haga la detección de blancos la larga distancia, y lo pasa para EMPAR cuando se aproxima o constituye una gran amenaza. La S1850M o Smartello, antes T1850, mezcla tecnología del SMART-L y Martillo.
Fragata Horizon modelo italiano.
SAMPSON
Cuando la Royal Navy se retiró del programa Horizon, para hacer un navío con características propias para su destructor Type 45 clase Daring, no fue abandonado el uso del sistema PAAMS. Sin embargo el radar EMPAR fue sustituido por el radar de barrido electrónica activo Sampson de la BAe Systems.
La Royal Navy estaba insatisfecha con el desempeño del EMPAR y tenía requerimientos más existentes como cobertura de 360 grados continúa. El Sampson usa dos antenas AESA, una de apoyo para la otra, en un montaje único rotativa. La rotación es de cerca de 30 rpm con mayor razón de datos que EMPAR, pues las dos antenas equivale a girar la 60rpm.
Un radar AESA también significa formar múltiples haces independientes, con mayor capacidad multiblancos y mayor alcance contra blancos de bajo RCS, menor razón de alarmas falsas y mayor precisión de acompañamiento.
Cada antena tiene 640 TRM, cada uno conectado la cuatro antenas, formando un arreglo de 2.560 elementos emitiendo un pico de potencia de 25KW por haz, comparado con máximo de 10KW de un radar convencional. Por operar generalmente la baja potencia, el radar es refrigerado a aire para disminuir la firma IR y por ser más barato que sistemas refrigerado el agua, más leve y más confiable.
Los TRM son controlados por software con comandos por fibra óptica. El haz principal puede ser apuntado en un arco de 60 grados en azimut y sin límite de elevación.
El software también tiene capacidad de realizar modos de evaluación de incursión, estimar tamaño físico del blanco y reconocimiento de blancos no cooperativos (NCTR), protección contra misiles anti-radar, evaluación de daños de batalla y mayor potencia.
La banda S fue escogida para facilitar el trabajo de detectar blancos pequeños en la presencia de lluvia y ruido de fondo/tierra que es más difícil en frecuencia mayores. El Sampson tiene capacidad de agilidad de frecuencia de banda ancha.
El desempeño no fue publicado. Fuentes no oficiales citan la capacidad de acompañar blancos de más de 400km; acompañar 500 la 1000 blancos; enganchar 12 simultáneamente con el ASTER. El PAAMS no necesita de iluminación terminal como el SPG-62 del sistema Aegis usado para controlar los misiles Standard y el APAR hace la iluminación por sí mismo y tiene uplink integrado para el Aster 15/30.
El desempeño es tal que no es necesario la instalación del radar S1850M de las fragatas Horizon Italianas y francesas que usan EMPAR por tener capacidad de alerta anticipado con la banda S. La BAe Systems alega que la configuración del Sampson no es tan pesada cuanto la configuración de cuatro antenas fijas del SPY-1 y puede ser colocado en mástil alto.
La banda S es buena para mantener la antena en buen tamaño, lleva menos tiempo que banda I para ir en todos lugares y con menos límite de alcance, pudiendo usar técnicas de mayor resolución.
El Sampson podrá usar banda I de iluminación para RIM-7P, ESSM y SM-2 si es necesario, pero usa la misma banda del radar SPY-1 pero tiene que tener un radar dedicado para iluminación.
El Sampson puede realizar búsqueda largo alcance, medio alcance, búsqueda en el horizonte de alta velocidad, hace búsqueda de grande ángulo, blancos múltiples, acompañamiento de blancos y multicanales de tiro, guiado de medio curso y clasificación de blancos. Hace la defensa de aérea para la fragata Type 45 sin necesitar de radar banda D de largo alcance para compilar el cuadro aéreo y vectorar los cazas. El alcance y de 400km.
Aspecto inicial del Sampson. El radar tendrá dos faces para tener la razón de datos necesaria para lidiar con blancos altamente maniobrabais. Pesa menos de 5 toneladas y los sistema adicionales se quedan en seis gabinetes y consolas.
El primer sistema de radar naval de nueva generación fue el demonstrador MESAR (Multifunction Electronically Scanned Adaptive Radar) del DERA británico (actual QinetQ). El concepto propuesto para sustituir sistemas de misiles Sea Dart fue iniciado en 1977. Pasó a llamarse proyecto Sampson para ser instalado en los programas NFR-90 y Common New Generation Frigate (CNGF) que ya fueron cancelados. Otros países participantes del programa iniciaron proyectos propios como el APAR y EMPAR.
La fase 1 del MESAR tendría 156 módulos con potencia de salida máxima de 2W por TRM y fue iniciado en 1986. La fase 2 fue iniciada en 1990 y el demonstrador completo de faz única fue probado en 1993.
El MESAR 2, más completo y con 1.264 TRM, o 25-un 30% de los elementos, con 10W potencia, se quedó pronto en 1995. Fue fabricado por la Siemeens Plessey. Fueron gastados US$ 160 millones en 17 años incluyendo fondos propios de la Siemens.
El Sampson es uno de los elementos del PAAMS, más un VLS Sylver o Mk41, un radar de búsqueda de volumen en la banda D SMART-L, un sistema de comando y control y el misil Aster.
La Siemens (actual BAe System) llegó a estudiar un derivado del MESAR conocido como Spectar con 2.560 TRM y peso de 2,5 toneladas para navíos de 1000t. Consumiría 100KW contra 175KW del Sampson y con desempeño degradado. Competiría con el AWS-9/Type 996 y no necesita de radar de acompañamiento lo que lo hace barato. Girando la 60rpm puede mantener cobertura 360 grados y realizando acompañamiento y guiado de medio curso de misiles superficie-aire. La razón de actualización sería de 2 segundos contra blancos la menos de 30 grados en el horizonte a 40km y 4 segundos contra blancos altos de más de 30km. El modo de búsqueda tiene razón de datos de 4 segundos contra blancos a 200km y 2 segundos a 25km. En 1993 el MESAR mostró que puede resistir la 10-12 interferencias en los lóbulos laterales y uno en el lobo principal al mismo tiempo sin afectar funciones. Esto resultó en nuevas formas de onda que darán mayor capacidad de contra-contramedidas al Sampson.
Antena actual del Sampson. La BAe Systems recibió un contrato US$ 100 millones para suministrar 12 radares Sampson para los destructores Type 45. El Sampson es el resultado de 20 años de investigación. El Sampson podrá ser instalado en los navíos del programa. Future Escort que sustituirán las Type 23.
Antena del demostrador de tecnología MESAR.
ARABEL
Los estudios del radar ARABEL fueron iniciados en 1982 en cooperación entre el Ministerio de la Defensa Francés y la Thomson-CSF AIRSYS. Estos estudios tuvieron éxito y fueron concluidos con pruebas en Landes. Cuando el programa Famille des systèmes Surface-Air Futurs - FSAF (misiles Aster) fue iniciado en 1989, el ARABEL fue escogido para ser el radar de control de tiro del SAAM-FR y SAMP-T.
El Arabel es un radar banda X de la Thales. Es un radar rotatorio que gira la 60 rpm capaz de detectar y atacar blancos múltiples con los misiles ASTER. Puede acompañar 100 blancos y atacar hasta 10 simultáneamente. El alcance es de 70 km contra blancos con RCS de 2m². Forma parte del sistema PAAMS terrestre y naval.
El Arabel equipará a las fragatas Al Riyadh (F3000S) de Arabia Saudí equipada con dos lanzadores óctuplos Sylver con misiles Aster 15. El mástil piramidal se queda el frente del hangar y es auxiliado por un radar de búsqueda de volumen DRBV 26D Jupiter que opera en la banda D.
También equipa el NAe francés Charles De Gaulle equipado con dos lanzadores óctuplos Sylver con misiles Aster 15.
Antena del radar Arabel.
La variante naval fue instalada en el navío "Ile d'Oléron" para pruebas. El segundo fue instalado en el "Charles de Gaulle" (foto). La versión terrestre del ARABEL hace control de tiro del SAMP-T. El radar tiene un up-link para pasar mensajes para el misil cambiar de dirección al calcular la trayectoria necesaria para que su radar interno pueda detectar y cerrar en el blanco.
Mars-Passat (Sky Watch)
El radar ruso Mars-Passat fue visto en los NAe Baku en el inicio de la década de 80 por satélites de reconocimiento. El radar fue llamado de Sky Watch por la OTAN.
El radar fue introducido en servicio junto con otros radares de barrido electrónico rusos como el Zaslon del Mig-31 y el Flap Lid de los sistemas SA-10. Los soviéticos ya habian introducido radares 3D con barrido vertical electrónico equivalentes al SPS-48 americano y demostraron la capacidad de producir elementos pequeños con el Zaslon. Los cruceros Kirov y Slava entraron en servicio con la capacidad de enganchar blancos múltiples gracias al guiado TVM del radar Top Dome.
El Sky Watch fue instalado en el Baku que intercambió de nombre varias veces hasta entrar en servicio con Admiral Kusnetsov. Fue planeado la instalación de un sofisticado sistema integrado de gerencia de batalla aérea semejante al SCANFAR y el AEGIS.
El sistema tuvo problemas técnicos y el navío entró en servicio cinco años después de ser lanzado (1987). Inmediatamente fue notado que ni todos los componentes del sistema fueron instalado como las antenas. Los problemas tenían más a ver con el software que con el hardware. Por otro lado, el A-50 era el equivalente aéreo y entró en operación sin problemas. El sistema fue abandonado y el NAe Varyag tuvo la superestructura alterada y recibiría antenas convencionales para ser completado.
Antenas del Mars-Passat en el Admiral Kusnetsov.
Fuente inicial: Sistemas de Armas
Suscribirse a:
Entradas (Atom)